
添加微信幫助解決機器人故障

 首頁 > ABB機器人維修 >
首頁 > ABB機器人維修 > 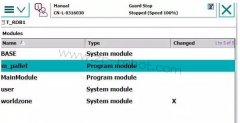
1)什么是碼垛? 有規律的移動機器人進行抓取及放置 2)ABB機器人維修-如何簡便碼垛程序 設置好工件坐標系,工具,對第一個碼垛放置點進行示教,xyz方向的間距和個數可設 3)如何創建 創建m_pallet模塊 建立兩個 在init 程序里,設置xyz方向個數和各方向間距 ... [全文]

ABB機器人數據存儲類型區別 CONST VAR PERS 區別 1)ABB機器人任何數據都有存儲類型,分為常量CONST,變量VAR和可變量 2)常量CONST,即程序內不能賦值 3)變量和可變量程序都能賦值,區別如下 變量-有初值和當前值。在執行打開程序,移動指針到main,移動指 ... [全文]
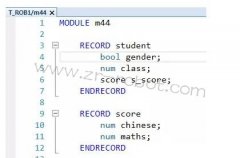
1)什么是數據類型? 諸如robtarget,jointtarget等,把一系列相關元素集合在一起,類似結構體 2)如何查看系統的數據類型 3)ABB機器人是否可以自定義數據類型? 可以 4)如何創建自定義數據類型 必須在創建在模塊的最前面,使用關鍵字RECORD 和ENDRECORD 5 ... [全文]
1)什么是數組? 將相同數據類型的元素按一定順序排列的集合 2)有什么用? 比如創建一個robtarget類型的數組p_array,p_array里有10個點位,走完10個位置就可以用如下代碼,方便簡潔 3)哪些數據類型能創建數組 所有數據類型都可以創建數組 4)數組最大幾維 ... [全文]
ABB機器人雙工位預約程序 1)有如下雙工位生產 2)工藝過程如下: 人工完成1#工位上料后按按鈕di_1(按鈕不帶保持,即人手松開信號為0))機器人焊接1#工位。 此過程中人工對2#工位上下料,完成后按di_2完成預約(即不需要等機器人完成1#工作)。 機器人完成 ... [全文]

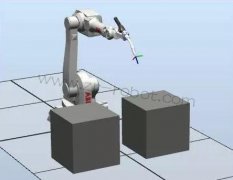
1、 ABB機器人Pdisp 軌跡偏移使用 1) 如果有下圖兩個產品,已經完成了右邊產品軌跡,左邊產品估計一樣,如何快速生成左邊軌跡(左邊產品可能有平移和旋轉) 2)完成右邊軌跡示教Path_30,如上圖。起點為Target_20。 3) 完成左邊起點的示教,為Target_ref_s ... [全文]

ABB機器人IRB 2600ID介紹: IRB 2600ID工業機器人在弧焊、物料搬運以及上下料的應用中省空間增產能。該機型采用集成配套(ID)技術并擴大了工作范圍,弧焊節拍時間最多可縮短15%, 占地成本減少75%。ABB機器人保養,IRB 2600ID有兩種機型:荷重15千克、到達距 ... [全文]

危險: 要對機器人控制柜進行維修和檢查時,確認主電源已經關閉。 警告: 更換潤滑油注意事項 油溫可能高于90度,待冷卻后更換 戴手套防止過敏反 應小心緩慢打開放油孔防止油飛濺 ABB機器人IRB1410維修時間間隔 1)檢查機械擋塊是否彎曲。 2) 檢查所有能看見 ... [全文]

ABB機器人IRB120是ABB新型第四代機器人家族的最新成員,也是迄今為止ABB制造的最小機器人。IRB120具有敏捷、緊湊、輕量的特點,控制精度與路徑精度俱優,是物料搬運與裝配應用的理想選擇。ABB六軸IRB120,僅重25kg,荷重3kg(垂直腕為4kg),工作范圍達580mm ... [全文]

ABB機器人IRB140的特點,體積 ... [全文]

正確規范的ABB噴涂機器人保養能夠較大限度保證機器人正常運行, 保證經濟效率并提高產量。因此,預防性ABB噴涂機器人保養是一項不可或缺的工作。 ABB IRB52噴涂機器人保養周期: 1.日常維護/一天 2.高壓檢查/一天 3.電流過載保護檢查/一天 4.2K系統油料混合管 ... [全文]

ABB IRB360 裝配機器人 FlexPickerTM是實現高精度拾放料作業的第二代三角式(Delta)機器人解決方案,擁有速度快、荷重大、精度佳、可靠性高、易用性強等優勢。 ABB IRB360 裝配機器人包括以下三個系列: 1、ABB機器人IRB360系列產品已擴展到3種型號。其中緊 ... [全文]


