
添加微信幫助解決機器人故障

 首頁 > ABB機器人維修 >
首頁 > ABB機器人維修 > 
ABB機器人日常檢查 1、剎車檢查 正常運行前,需檢查電機剎車每個軸的電機剎車檢查方法如下: (1)運行每個機械手的軸到它負載最大的位置。 (2)機器人控制器上的電機模式選擇開關打到電機關(MOTORSOFF)的位置)。 (3)檢查軸是否在其原來的位置如果電機 ... [全文]
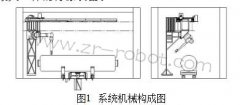
隨著機器人噴涂技術的日益成熟,噴涂機器人開始應用。ABB IRB5500機器人自動噴涂系統,詳細地介紹了噴涂系統各部分的組成,重點介紹了控制系統及軟件。 ... [全文]

ABB噴涂機器人具有效率高、通用性強和工作可靠等優點,在ABB噴涂機器人過程中得到了廣泛應用。柔性化、節省投資和能耗、高度集成化成為研發新一代機器人關注的重點。 ... [全文]

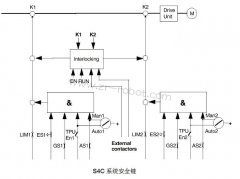
S4P+系統噴涂機器人產品介紹: ABB噴涂機器人分為以下三類: ABB機器人組成: ABB機器人由以下幾部分組成: Controller: 控制器(控制箱)。 Teach pendant: 示教器。 Control panel: 控制面板(又稱操作盤 operators panel)。 Manipulator: 機械手。 Purge uni ... [全文]
ABB TR5002噴涂機器人技術,目前在國內使用的機器人噴涂,這些設備引進較早,控制精度較差;新的涂裝線普遍采用ABB、FANUC、MOTOMAN、DURR等多軸機器人,下面主要是以ABB機器人為基礎進行討論。 ... [全文]
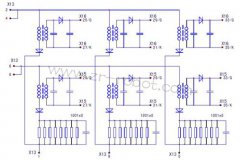
DCS400直流調速器的末級觸發電路 電源/驅動板一般安裝有6路觸發脈沖電路,另外還預留有另6路末級觸發脈沖電路,散熱器上的模塊安裝孔也預留有6塊晶閘管的安裝位置,以實現調速器控制負載電機二象限或四象限運行(從軟件到硬件)的可兼容性。 ... [全文]
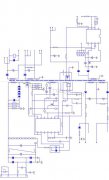
DCS400直流調速器開關電源電路 由X98端子進入的AC220V電源,經兩只限流電阻引入橋式整流電路,又經CLC電路濾波后,作為開關電源的直流供電電源。開關電源電路一般包括以下幾個回路: 1)振蕩回路。由10只10k串聯電阻、470電阻、穩壓管構成電源起動電路,14腳 ... [全文]
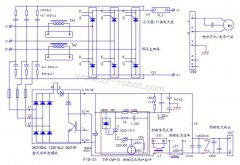
ABB機器人DCS400線路板的電路原理 1、DCS400直流調速器電源/驅動板電路原理分析 DCS400直流調速器電源/驅動板包括電樞主電路、勵磁輸出電路、開關電源電路、末級觸發電路等組成。 DCS400直流調速器電樞主電路、勵磁主電路 電樞主電路為三相全控橋的典型結構 ... [全文]
機器人保養檢查表 機器人本體: 檢查動力電纜與通訊電纜。 檢查各軸運動狀況。 檢查各軸密封。 檢查機器人零位。 檢查機器人標定數據。 檢查機器人電池。(大于7.2V) 檢查機器人各軸馬達與剎車。 檢查機器人各軸電纜。 機器人各軸加潤滑油。 機器人控制柜: ... [全文]
ABB機器人系統備份及冷啟動 系統備份及冷啟動 系統備份 系統備份是指系統軟件與應用軟件的保存。 機器人的系統軟件和應用軟件均保存在軟盤或機器人Ram1disk上,軟盤并不適于長時間保存數據,機器人的某些故障會導致Ram1disk上數據丟失。 系統和應用軟件的不 ... [全文]
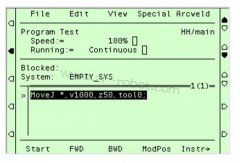
ABB機器人維修程序指令運行 測試 1. 手動減速狀態/編程窗口/File/Check Program 檢查程序語法 2. 編程窗口/Test 切換至程序測試窗口 Start 啟動程序,機器人按程序指令運行。 FWD 機器人按程序指令順序向前運行一個指令。 通過程序指針與光標確定當前指令行 ... [全文]
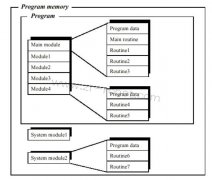
編程與測試 1、程序的組成: 應用程序是由三個不同部分組成: 1. 一個主程序。 2. 幾個子程序(例行程序)。 3. 程序數據。 除此之外,程序儲存器還包括系統模塊。USER模塊與BASE模塊在機器人冷啟動后自動生成。 編程窗口: 1. File Open 打開一個現有文件。 ... [全文]


