簡介:ABB機(jī)器人維修程序指令運(yùn)行 測試 1. 手動(dòng)減速狀態(tài)/編程窗口/File/Check Program 檢查程序語法 2. 編程窗口/Test 切換至程序測試窗口 Start 啟動(dòng)程序,機(jī)器人按程序指令運(yùn)行。 FWD 機(jī)器人按程序指令順序向前運(yùn)行一個(gè)指令。 通過程序指針與光標(biāo)確定當(dāng)前指令行……
1. 手動(dòng)減速狀態(tài)/編程窗口/File/Check Program
檢查程序語法
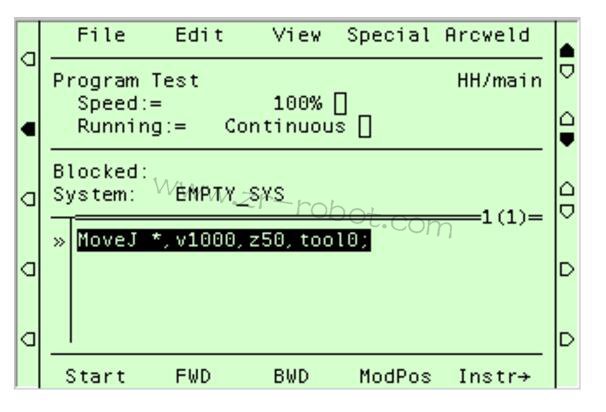
2. 編程窗口/Test
切換至程序測試窗口
Start 啟動(dòng)程序,機(jī)器人按程序指令運(yùn)行。
FWD 機(jī)器人按程序指令順序向前運(yùn)行一個(gè)指令。
通過程序指針與光標(biāo)確定當(dāng)前指令行。
BWD 機(jī)器人按程序指令順序向后運(yùn)行一個(gè)指令。
通過程序指針與光標(biāo)確定當(dāng)前指令行。
Modpos 修正機(jī)器人運(yùn)行位置。
Instr> 切換至指令窗口。
3. 選擇運(yùn)行模式:在測試窗口按切換鍵。
Cont 連續(xù)運(yùn)行,程序執(zhí)行完畢,自動(dòng)循環(huán)執(zhí)行。
Cycle 單次運(yùn)行,程序執(zhí)行完畢,自動(dòng)停止。
4. 選擇運(yùn)行速度:
100%為程序內(nèi)定速度或250 mm/s。
-%、+%在1%至5%之間以1%遞增或遞減。
-%、+%在5%至100%之間以5%遞增或遞減。
運(yùn)行速度調(diào)整可在程序運(yùn)行時(shí)同步進(jìn)行。
在焊接中,只改變空行程速度,焊接速度不變。
5. 按Special/Move……/選擇程序測試起點(diǎn)
PP “》”指針(待執(zhí)行指令)
Course 光標(biāo)(黑色背景部分
6. 電機(jī)上電(Enable)/FWD 或Start 開始程序測試。
可選擇Special/simulate/add 進(jìn)行電機(jī)斷電方式測試(機(jī)器人不動(dòng))
機(jī)器人將按程序運(yùn)行,注意安全。
7. 修正工作點(diǎn)。
將光標(biāo)移動(dòng)到需要修正的工作點(diǎn)上按 Modpos 鍵修正工作點(diǎn)。
注意操作窗口所選的Tool及Wobj必須與工作點(diǎn)所在的指令行一致。
8. 刪除一個(gè)指令行
將光標(biāo)移至所要?jiǎng)h除的指令行/按刪除鍵/用OK確認(rèn)。
9. 增加一個(gè)指令行
按Instr>鍵進(jìn)入指令窗口/選擇指令/被選擇的指令生成在光標(biāo)所指指令行的下一行。如果光標(biāo)在程序第一行會(huì)出現(xiàn)一個(gè)提示窗口選擇新指令生成在程序第一行或下一行,用OK確認(rèn)。
10. 運(yùn)行正確,按S-Stop鍵停止測試。
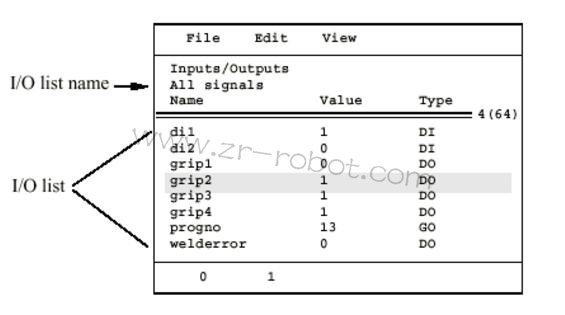
輸入與輸出
輸入輸出窗口:
在輸入輸出窗口或編程窗口不能更改或定義輸入輸出信號(hào),所有操作只能在系統(tǒng)參數(shù)中進(jìn)行。
窗口顯示所有用戶信號(hào),對(duì)DO信號(hào)可以手動(dòng)用功能鍵賦值1或0。
當(dāng)手動(dòng)賦值時(shí),與機(jī)器人配合的外圍設(shè)備可能運(yùn)動(dòng),注意安全!
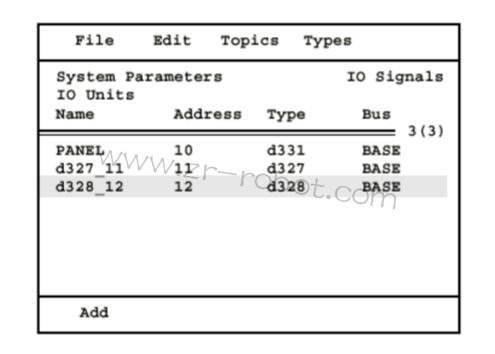
定義I/O信號(hào)板:
1. 其他窗口/System Parameters/回車/
2. Topics/IO Signals/回車/Type/IO Boards/
3. 用Add鍵定義新IO板或用刪除鍵刪除/File/Restart
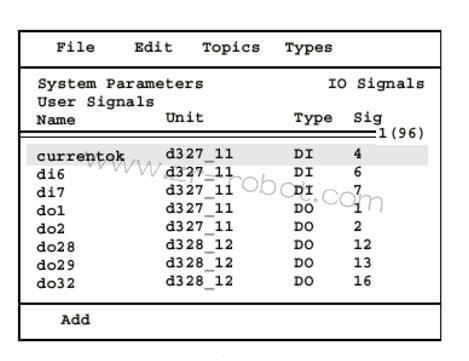
定義或更改用戶信號(hào):
1. 其他窗口/System Parameters/回車/
2. Topics/IO Signals/回車/
3. Type/IO Boards/將光標(biāo)移至所需輸入輸出板/回車/
4. 用Add增加用戶信號(hào)/用刪除鍵刪除用戶信號(hào)/
5. 將光標(biāo)移至所選信號(hào)/回車/可以更改信號(hào)數(shù)據(jù)(定義信號(hào)名等)/
文章來源,
工業(yè)機(jī)器人維修官網(wǎng):www.qhdjznet.com

 機(jī)器人資訊
機(jī)器人資訊 80%企業(yè)面臨倒閉,工業(yè)機(jī)器人產(chǎn)能嚴(yán)重過剩
80%企業(yè)面臨倒閉,工業(yè)機(jī)器人產(chǎn)能嚴(yán)重過剩
 首頁 > ABB機(jī)器人維修 >
首頁 > ABB機(jī)器人維修 >