簡(jiǎn)介:合上電源 合上電源前,要檢查確認(rèn)無人處于機(jī)器人周圍的防護(hù)區(qū)內(nèi)。 合上主電源開關(guān) 系統(tǒng)自動(dòng)檢查機(jī)器人硬件,當(dāng)檢查完成且無故障被檢測(cè)到,系統(tǒng)將在示校器上顯示如下信息 在自動(dòng)模式下,生產(chǎn)窗口將在幾秒鐘后出現(xiàn)。 機(jī)器人通常以上次電源關(guān)閉時(shí)相同的狀態(tài)啟動(dòng)……
合上電源
合上電源前,要檢查確認(rèn)無人處于機(jī)器人周圍的防護(hù)區(qū)內(nèi)。
合上主電源開關(guān)
系統(tǒng)自動(dòng)檢查機(jī)器人硬件,當(dāng)檢查完成且無故障被檢測(cè)到,系統(tǒng)將在示校器上顯示如下信息
在自動(dòng)模式下,生產(chǎn)窗口將在幾秒鐘后出現(xiàn)。
機(jī)器人通常以上次電源關(guān)閉時(shí)相同的狀態(tài)啟動(dòng)。程序指針保持不變;全部數(shù)字輸出都置為斷電以前的值,或者置為系統(tǒng)參數(shù)中指定的值。當(dāng)開機(jī)后程序重新啟動(dòng)時(shí),是正常的開關(guān)機(jī):
機(jī)器人慢慢地回到編程路徑(有偏差),然后在程序的路徑上繼續(xù)。
運(yùn)動(dòng)設(shè)定和數(shù)據(jù)自動(dòng)被設(shè)定到斷電前相同的值。
機(jī)器人將繼續(xù)對(duì)中斷作出反應(yīng)。
在斷電前激活的機(jī)械單元將在程序開始后自動(dòng)被激活。
弧焊和點(diǎn)焊過程自動(dòng)被重置。但是,如果程序正好執(zhí)行到焊接數(shù)據(jù)有變化時(shí),新數(shù)據(jù)將在接縫上過早被激活。
限制:
全部文件和串行通道都被關(guān)閉(可由用戶程序控制)。
全部模擬輸出都被置為0,軟飼服置為缺省值上(可由用戶程序控制)。
焊縫跟蹤不能被重置。
獨(dú)立的軸不能被重置。
如果在中斷例行程序或錯(cuò)誤處理程序執(zhí)行時(shí)發(fā)生斷電,程序路徑不可能重新開始。
如果在中央處理器非常忙的時(shí)候發(fā)生斷電,有可能由于系統(tǒng)無法正常關(guān)機(jī)而導(dǎo)致無法重新啟動(dòng)。機(jī)器人在這種情況下將告訴用戶重新開始不可能。
啟動(dòng)時(shí)的故障
機(jī)器人啟動(dòng)時(shí)將對(duì)機(jī)器人功能進(jìn)行廣泛的檢查。如果發(fā)生錯(cuò)誤,會(huì)在示教器上以一般文本信息格式進(jìn)行報(bào)告,并在機(jī)器人的事件記錄中進(jìn)行記錄。 欲了解詳細(xì)信息,請(qǐng)參閱產(chǎn)品手冊(cè)。
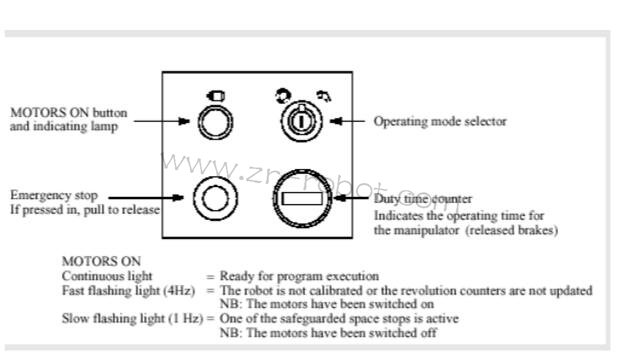
操作面板
下圖為操作面板的功能描述
MOTORS ON 指示燈狀態(tài):
持續(xù)亮: 程序待命狀態(tài)。
快速閃爍(4Hz): 機(jī)器人不同步,電機(jī)已上電。
慢速閃爍(1Hz): 運(yùn)行鏈斷開,電機(jī)未上電。
緊急制動(dòng)及緊急制動(dòng)的復(fù)位
當(dāng)急停鍵有效后,電機(jī)電源被迅速切斷而停止程序運(yùn)行。 排除引起急停的因素后,復(fù)位急停鍵并重新按下MOTORS ON即可恢復(fù)系統(tǒng)。
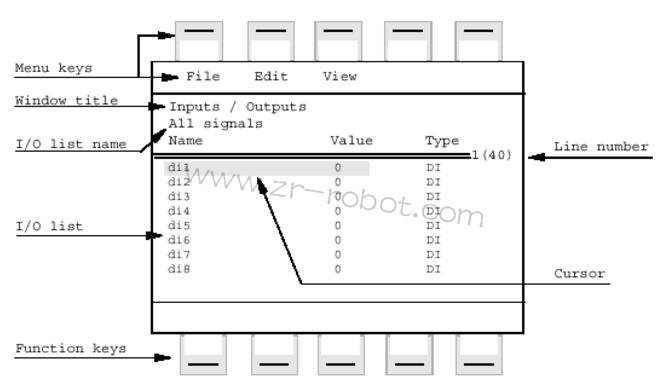
用窗口進(jìn)行工作
在本章中我們學(xué)習(xí)如何打開一個(gè)窗口并使用它,如下圖,以INPUT/OUTPUT(輸入/輸出窗口)為例進(jìn)行說明。按鍵進(jìn)入 INPUT/OUTPUT(輸入/輸出窗口)
輸入/輸出窗口中I/O列表的顯示取決于系統(tǒng)中信號(hào)的定義及系統(tǒng)中有多少I/O板。
通過導(dǎo)航鍵或編輯鍵可以選擇I/O信號(hào)。按回車鍵可查詢?cè)撔盘?hào)的連接及設(shè)置信息
選擇輸出信號(hào)時(shí)可用功能鍵改變輸出狀態(tài)。
文章來源,
工業(yè)機(jī)器人維修官網(wǎng):www.qhdjznet.com

 機(jī)器人資訊
機(jī)器人資訊 80%企業(yè)面臨倒閉,工業(yè)機(jī)器人產(chǎn)能嚴(yán)重過剩
80%企業(yè)面臨倒閉,工業(yè)機(jī)器人產(chǎn)能嚴(yán)重過剩
 首頁 > ABB機(jī)器人維修 >
首頁 > ABB機(jī)器人維修 >