簡介:相對于ABB機器人運動過程模式,以下模式 Cycle Time要慢 X %: Accuracy Mode: 0% - 15% Low Speed Accuracy Mode: 1% - 30% Low Speed Stiff Mode: 2% - 100% 機器人品牌: ABB 軟件版本: RW 6.0及以上 配置參數:MOTION_PROCESS_MODE 參數地址:控制面板-……
相對于
ABB機器人運動過程模式,以下模式 Cycle Time要慢 X %:
Accuracy Mode: 0% - 15%
Low Speed Accuracy Mode: 1% - 30%
Low Speed Stiff Mode: 2% - 100%
機器人品牌: ABB
軟件版本: RW 6.0及以上
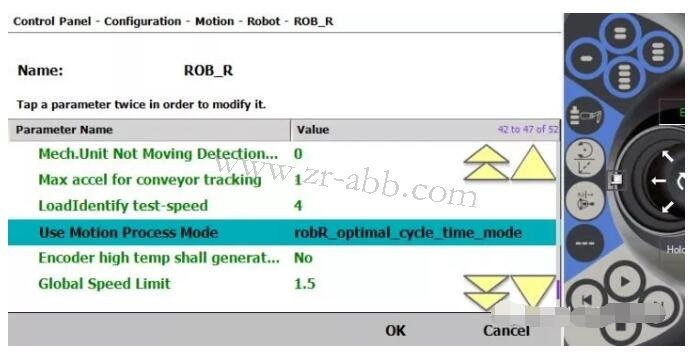
配置參數:MOTION_PROCESS_MODE
參數地址:控制面板-->配置-->Motion-->Robot
其中,如果要自定義,不是所有的參數都是通用的。
比如,IRB1410 不支持 World Acc Factor。
已定義的ABB機器人運動過程模式:
Optimal cycle time mode:
默認模式。該模式能給予機器人應用最可能短的 Cycle Time;
Accuracy mode
該模式能提高路徑精度。
已定義的 Motion Process Mode:
Optimal cycle time mode:
默認模式。該模式能給予機器人應用最可能短的 Cycle Time;
Accuracy mode
該模式能提高路徑精度。
但相對于 Optimal Cycle Time Mode, cycle time的時間會有所增長;
一般推薦于在中小型,比如 IRB 1600, IRB 2400等機器人上使用;
Low speed accuracy mode
和 Accuracy Mode 相同的功能;
一般推薦于在大型,比如 IRB 4600 等機器人上使用;
Low speed stiff mode
推薦使用在類似壓裝等對剛度要求高的應用中;
也可以用來在一些低速的應用中減少路徑的抖動;
該模式的 Cycle Time 會比 Low speed accuracy mode 還要長;
其他模式:
MPM User mode 1 – 4:
Motion Process Mode 內置參數修改:
修改的數據根據實際生產調試的效果來調整。
不同模式中默認的數值“1”代表的默認參數也不一樣。
除了手動調整,可以通過RAPID語句來修改參數。
對于特定的應用,可以調配特定的模式。
參數的選擇有時可能要精確到小數點后兩位,所以有時候要花很多時間去找到合適的值。
部分參數說明:
Accset Acc Factor:
用來改變加速度;
如果值為 0.8 ,則意味著 降速 20%;
在 Optimal cycle time mode 中,將其中修改超過 1.0 不會有任何效果;
減少加速度可以減緩抖動和路徑錯誤能問題,但是會延長 Cycle Time。
Dh Factor
通過調整機械單元的有效帶寬來改善路徑的平滑度;
其值越小,路徑越平滑,對于高載荷下的抖動問題成效顯著;
Df Factor
Df 可以調整特定軸機械結構的共振頻率引;
一般用來補償因為基座松動或者剛性不足而引發的抖動問題,所以1&2軸用的比較多。
根據經驗,其值通常在 0.9~1為佳。 最優值通常可以用 ABB 軟件 Tune Master 來采集;
Kp Kv Ti Factor
增加 Kp 或者 Kv 皆可以減少路徑錯誤并增加剛度,但是,在有些情況下會加劇路徑抖動。
通常來講,如果需要調整位置或者速度參數,用 Kv 而不是 Kp 或者Ti 來實現;
但如果 Kv 值太大,可能會引發電機噪音。
Joint Acc Factor
Joint Acc Factor 可用來降低特定關節的加速度。
比如,其值為0.6的時候,表示加速度降低了40%。
它可以被用來降低因特定關節加速度而引起的路徑抖動,比如,在4~6軸做TCP重定位旋轉的時候。
World Acc Factor
當給 World Acc Factor 設定了一個正值(1~100)的時候,就可以動態地去降低全局加速度;
推薦的值為1 (即為默認值);
如果其值為-1, 則代表改功能已被關閉;
該值可以可以減少路徑錯誤,也會稍微增加 Cycle Time。
由于 World Acc Factor 基于路徑特性且為動態,所以它相對于 Accset Acc Factor ,反而是一個最有效的(對 Cycle Time 影響最小)改善路徑精度的參數。
World Acc Factor 一般推薦于使用在 切割類的應用,因為此類應用對路徑的精度要求很高。
該參數不適用于 IRB 340, IRB 360, IRB 540, IRB 1400, IRB 1410。
Geometric Accuracy Factor
Geometric Accuracy Factor 用于調整路徑的幾何精度;
對于 Accuracy Mode, 推薦值為1。
對于其他模式,如果要改善進度,推薦值為0.1
文章來源,
工業機器人維修官網:www.qhdjznet.com


 首頁 > ABB機器人維修 > ABB機器人保養 >
首頁 > ABB機器人維修 > ABB機器人保養 > 

