簡介:ABB機器人系統 ABB機械手為六軸組成的空間六桿開鏈機構,理論上可達到運動范圍內任何一點。每個轉軸均帶一個齒輪箱,機械手運動精度(綜合)達正負0.05mm至正負 0.2mm。六軸均帶AC伺服電機驅動,每個電機后均有編碼器與剎車。機械手帶有串口測量板(SMB),……
ABB機械手為六軸組成的空間六桿開鏈機構,理論上可達到運動范圍內任何一點。每個轉軸均帶一個齒輪箱,機械手運動精度(綜合)達正負0.05mm至正負 0.2mm。六軸均帶AC伺服電機驅動,每個電機后均有編碼器與剎車。機械手帶有串口測量板(SMB),測量板上帶有六節可充電的鎳鉻電池,起到保存數據的作用。機械手帶有手動松閘按鈕,
ABB機器人維修時使用,非正常使用會造成設備或人員被傷害。ABB機械手帶有平衡氣缸或彈簧。
ABB機器人IRC5 系統介紹
主電源、計算機供電單元、計算機控制模塊(計算機主體)、輸入/輸出板、Customer connections(用戶連接端口)、FlexPendant接口(示教盒接線端)、軸計算機板、驅動單元(機器人本體、外部軸)。
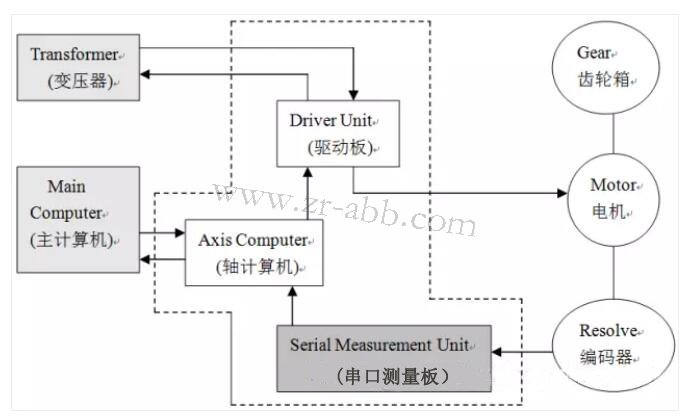
ABB機器人伺服驅動系統
ABB機器人系統構成
A 操縱器(所示為普通型號)
B1 IRC5 Control Module,包含機器人系統的控制電子裝置。
B2 IRC5 Drive Module,包含機器人系統的電源電子裝置。在 Single Cabinet Controller 中, Drive Module 包含在單機柜中。MultiMove 系統中有多個 Drive Module。
C RobotWare 光盤包含的所有機器人軟件
D 說明文檔光盤。
E 由機器人控制器運行的機器人系統軟件。
F RobotStudio Online 計算機軟件(安裝于 PC x 上)。RobotStudioOnline 用于將 RobotWare 軟件載入服務器,以及配置機器人系統并將整個機器人系統載入機器人控制器。
G 帶 Absolute Accuracy 選項的系統專用校準數據磁盤。不帶此選項的系統所用的校準數據通常隨串行測量電路板 (SMB) 提供。
H 與控制器連接的 FlexPendant,
J 網絡服務器(不隨產品提供)。 可用于手動儲存:
•RobotWare •成套機器人系統 •說明文檔
在此情況下,服務器可視為某臺計算機使用的存儲單元,甚至計算機本身!
如果服務器與控制器之間無法傳輸數據,則可能是服務器已經斷開!
PC K 服務器的用途:
使用計算機和 RobotStudio Online 可手動存取所有的 RobotWare 軟件。
手動儲存通過便攜式計算機創建的全部配置系統文件。
手動存儲由便攜式計算機和 RobotStudio Online安裝的所有機器人說明文檔。
在此情況下,服務器可視為由便攜式計算機使用的存儲單元。
M RobotWare 許可密鑰。 原始密鑰字符串印于 Drive Module 內附紙片上(對于 Dual Controller,其中一個密鑰用于 Control Module,另一個用于 Drive Module;而在 MultiMove 系統中,每個模塊都有一個密鑰)。RobotWare 許可密鑰在出廠時安裝,從而無需額外的操作來運行系統。
N 處理分解器數據和存儲校準數據的串行測量電路板(SMB)。 對于不帶Absolute Accuracy 選項的系統,出廠時校準數據存儲在 SMB 上。PC x 計算機(不隨產品提供)可能就是上圖所示的服務器J!如果服務器與控制器之間無法傳輸數據,則可能是計算機已經斷開連接!
文章來源,
工業機器人維修官網:www.qhdjznet.com


 首頁 > ABB機器人維修 >
首頁 > ABB機器人維修 >