簡(jiǎn)介:進(jìn)入拆卸環(huán)節(jié)前,先要關(guān)注的是拆卸電機(jī)前的注意事項(xiàng)。對(duì)于IRB2400和IRB1410型號(hào)的機(jī)器人,當(dāng)涉及到2軸和3軸的拆卸時(shí),操作人員必須首先手動(dòng)釋放電機(jī)剎車,確保2軸和3軸能夠完全壓下到死限位。這一步至關(guān)重要,它能有效防止在電機(jī)拔出過程中,由于2軸和3軸失去……
在準(zhǔn)備工具方面,需要確保擁有以下物品:一個(gè)24V/100W的開關(guān)電源及其相應(yīng)的連接出線,一副梅花內(nèi)六角扳手,一把斜口鉗,以及其他可能用到的輔助工具。
進(jìn)入拆卸環(huán)節(jié)前,先要關(guān)注的是拆卸電機(jī)前的注意事項(xiàng)。對(duì)于IRB2400和IRB1410型號(hào)的機(jī)器人,當(dāng)涉及到2軸和3軸的拆卸時(shí),操作人員必須首先手動(dòng)釋放電機(jī)剎車,確保2軸和3軸能夠完全壓下到死限位。這一步至關(guān)重要,它能有效防止在電機(jī)拔出過程中,由于2軸和3軸失去剎車而突然掉落,從而可能對(duì)操作人員造成傷害。此外,整個(gè)拆卸電機(jī)的過程都必須在斷電的狀態(tài)下進(jìn)行,以確保操作的安全性。
在六個(gè)軸電機(jī)的拆卸小結(jié)中,需要注意以下幾點(diǎn):
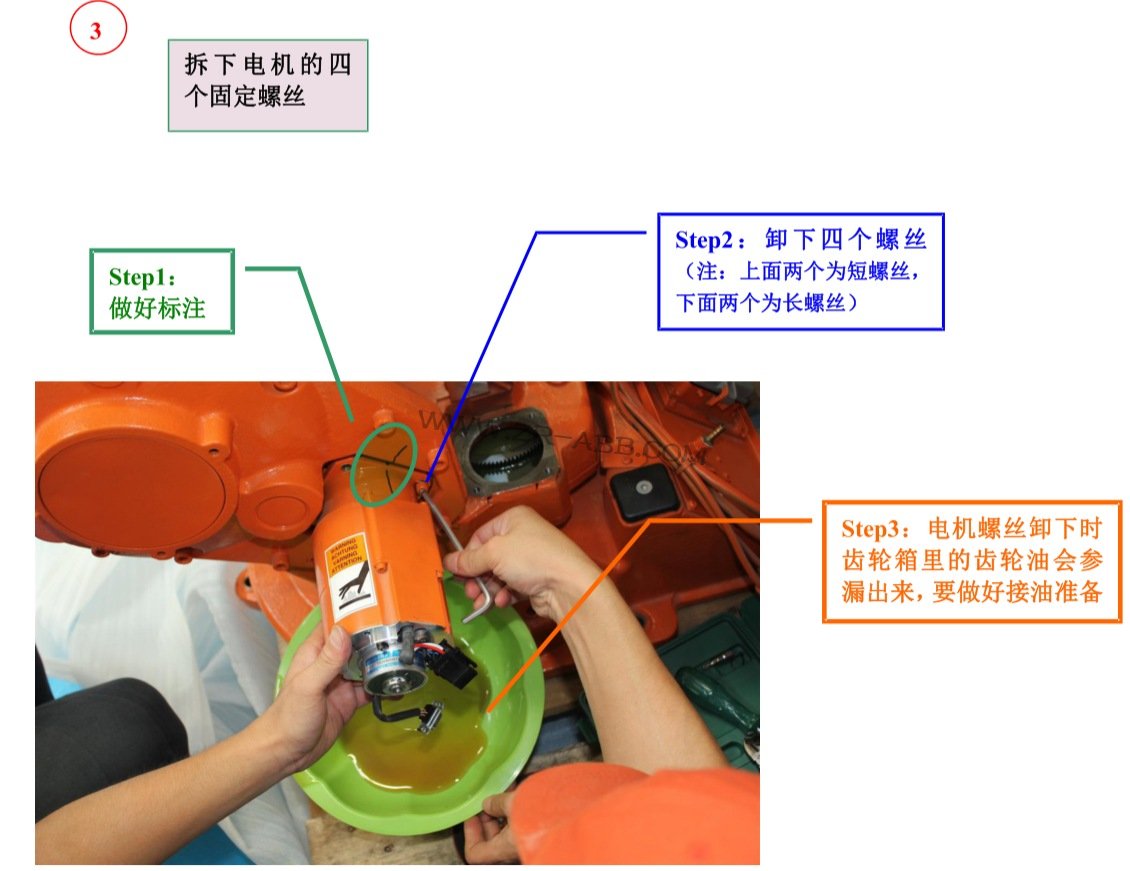
- 1軸至3軸的齒輪箱內(nèi)都含有大約5L的齒輪油,
- 在拆卸馬達(dá)時(shí),需要提前準(zhǔn)備好容器,以便在電機(jī)拔出時(shí)能夠接住流出的齒輪油;
- 2軸和3軸的電機(jī)與4軸、5軸、6軸的電機(jī)屬于同一種型號(hào),在多個(gè)電機(jī)同時(shí)拆卸的情況下,需要特別注意分辨各個(gè)軸,以避免混淆。
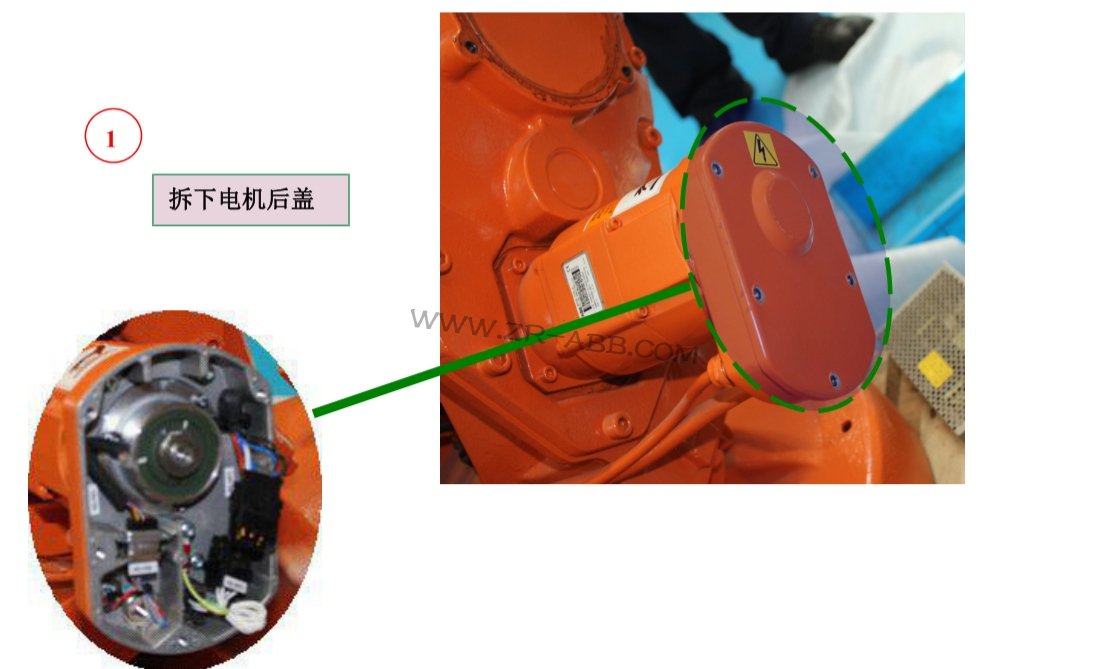
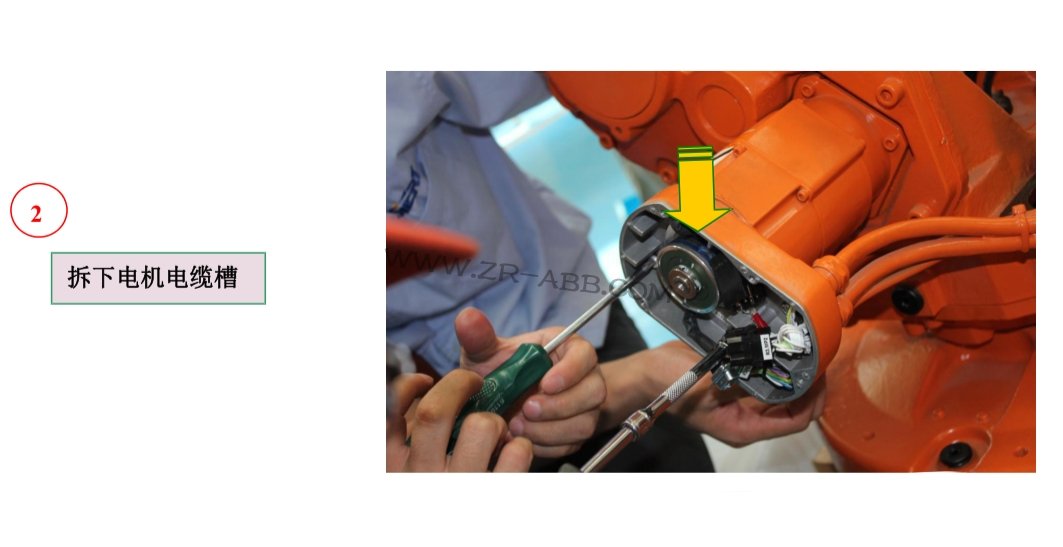
接下來,以ABB機(jī)器人手臂維修2軸電機(jī)的拆卸步驟為例進(jìn)行說明(具體步驟如圖所示)。
在安裝環(huán)節(jié),2軸電機(jī)的安裝方法需要按照拆卸時(shí)的逆步驟進(jìn)行。
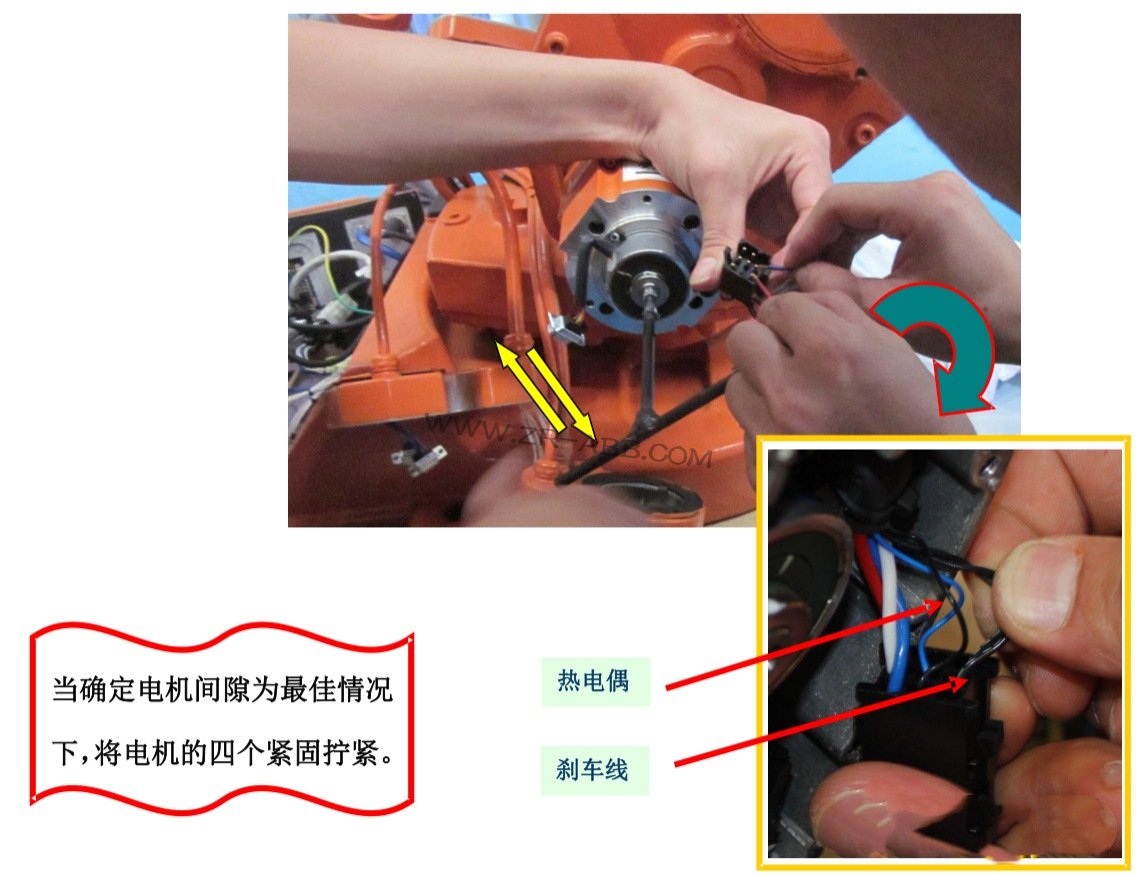
- 將電機(jī)按照原來的方向插入到齒輪箱中,并將四個(gè)緊固螺絲輕輕旋上,但不要立即擰緊,以便后續(xù)調(diào)整電機(jī)輸出齒輪與齒輪箱齒輪之間的配合間隙。
- 調(diào)整間隙時(shí),可以使用自制的“起子”工具,將其鎖在電機(jī)轉(zhuǎn)軸編碼器端上。
- 使用24V直流開關(guān)電源連接到電機(jī)的剎車兩根線上,釋放剎車。在確認(rèn)剎車已經(jīng)打開后,可以手動(dòng)來回微動(dòng)自制工具“起子”,通過手感來判斷并調(diào)整所需的間隙大小(注意用力不要過大,以免帶動(dòng)齒輪箱轉(zhuǎn)動(dòng))。
- 調(diào)整好間隙后,將電機(jī)鎖緊,并按照拆裝的反步驟將電機(jī)的電纜槽、電纜以及電機(jī)蓋安裝上。
ABB機(jī)器人手臂維修電機(jī)安裝完畢后,需要進(jìn)行上電試運(yùn)行,確認(rèn)無誤后,對(duì)2軸齒輪箱重新注入齒輪油(注油時(shí)需要耐心等待,可以自制一個(gè)注油工具,確保注油時(shí)內(nèi)部氣體能夠順暢排出)。其他軸的安裝步驟與2軸相同。
最后,需要特別注意的是,在電機(jī)安裝完畢后,建議不要進(jìn)行微校操作,因?yàn)檫@樣做可能會(huì)導(dǎo)致TCP精度無法得到保證。
以上就是ABB機(jī)器人手臂維修時(shí)電機(jī)拆裝的詳細(xì)步驟。為確保伺服電機(jī)的正常運(yùn)行,我們建議定期進(jìn)行預(yù)防性的維護(hù)和檢查工作。
文章來源,
工業(yè)機(jī)器人維修官網(wǎng):www.qhdjznet.com

 機(jī)器人資訊
機(jī)器人資訊 80%企業(yè)面臨倒閉,工業(yè)機(jī)器人產(chǎn)能嚴(yán)重過剩
80%企業(yè)面臨倒閉,工業(yè)機(jī)器人產(chǎn)能嚴(yán)重過剩
 首頁 > ABB機(jī)器人維修 >
首頁 > ABB機(jī)器人維修 >