簡介:電氣連接的檢查與修復:電氣連接問題同樣可能導致驅動器過熱等故障。在檢查過程中,需重點關注ABB工業機械手電機與控制柜之間的連接電纜是否正常,特別是控制柜處的航空插頭是否插緊且無損壞。若發現連接電纜存在問題,需及時更換或修復以確保電氣連接的穩定……
ABB機械手IRC5控制柜電氣單元的拆裝與維護指導:
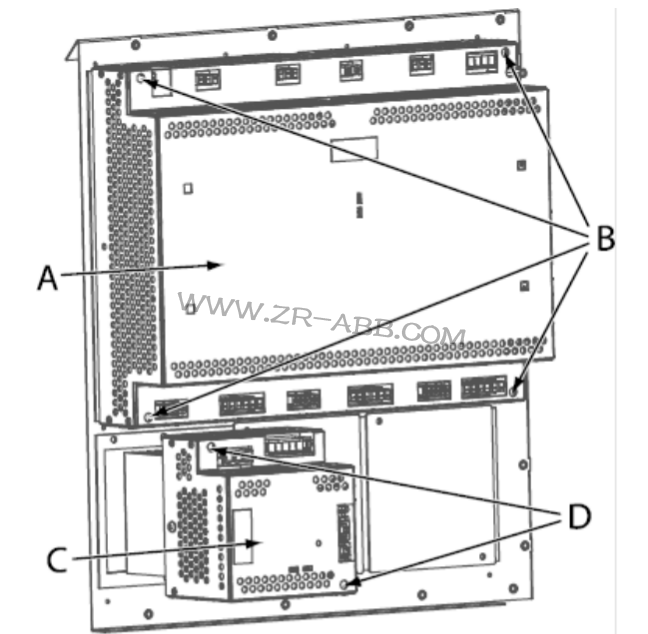
更換驅動單元的詳細步驟:
· 先需要確保安全,從ABB工業機械手驅動模塊上小心翼翼地拆除所有接頭,確保每個接頭都已穩妥斷開,避免任何意外的電流沖擊。
· 接著,使用合適的工具拆除固定驅動單元的所有螺釘,確保螺釘被完整取出,避免遺失。
· 在確認所有連接都已斷開且螺釘已移除后,平穩而堅定地拉出驅動單元,注意保持手部穩定,避免對周圍部件造成損傷。
· 安裝新ABB機械臂驅動單元時,步驟與上述相反,需確保每個螺釘都牢固擰緊,每個接頭都正確且緊密地連接。
關于ABB工業機械臂驅動器的供電模式解析:
工業機器人電氣系統的典型結構設計中,串聯了兩個接觸器,這兩個接觸器的吸合與放開動作均由機器人的安全電路模塊精準控制。驅動器的供電模式主要分為兩種:
· 第一種是直接切斷驅動器的供電,隨后釋放剎車,此時依靠剎車片的摩擦來實現制動效果。
· 第二種則是先通過驅動器控制實現減速制動,待速度降低至安全范圍后,再切斷供電并釋放剎車。
伺服電機的工作原理深度解析:
ABB機器人的本體(即機械臂)擁有六個自由度,每個自由度都由一個高效的三相交流伺服電機(Servo Motor)提供強勁的動力支持。伺服電機內部除了包含三組關鍵的線圈繞組導線外,還配備了剎車(Brake)和編碼器(Resolver)等核心部件。當電機開始工作時,剎車片會自動松開,電機則依靠磁場的力量保持穩定運轉;而當電機溫度出現異常升高時,PTC的總阻值會隨之增大,此時控制器會立即發出報警并停止電機的工作,以確保安全。
ABB機器人維修的綜合考量與故障排查:
在進行ABB機器人的維修時,需要從多個角度進行細致的考量與處理。針對可能出現的故障,以下是一些關鍵的ABB機器人驅動器維修方法和注意事項:
· 工作環境溫度的監測與調控:驅動器3HAC029818-001的工作環境溫度對其散熱性能有著至關重要的影響。若工作環境溫度過高,將嚴重影響驅動器的散熱效果,進而引發過熱問題。因此,需確保機器人的工作環境溫度始終保持在適宜的范圍內,并采取相應的降溫措施,如增設通風設備、優化車間布局等。
· 內部散熱系統的檢查與維護:ABB機器人驅動器3HAC029818-001內部散熱不良也是導致過熱問題的一個重要原因。在檢查過程中,可以打開驅動器外殼,仔細觀察其內部散熱風扇的運轉情況是否正常,以及散熱片是否保持清潔無堵塞。一旦發現散熱風扇損壞或散熱片堵塞等問題,需立即進行更換或清理工作。
· 電機負載的監測與優化:電機負載過大是導致ABB機械臂驅動器3HAC029818-001過熱的一個常見且關鍵的原因。通過觀察機器人的運行狀態和負載情況,可以及時發現是否存在負載異常的問題。若發現負載過大,需迅速調整機器人的工作參數或優化工作流程,以降低負載并防止過熱問題的發生。
· 電氣連接的檢查與修復:電氣連接問題同樣可能導致驅動器過熱等故障。在檢查過程中,需重點關注ABB工業機械手電機與控制柜之間的連接電纜是否正常,特別是控制柜處的航空插頭是否插緊且無損壞。若發現連接電纜存在問題,需及時更換或修復以確保電氣連接的穩定性和可靠性。
文章來源,
工業機器人維修官網:www.qhdjznet.com


 首頁 > ABB機器人維修 >
首頁 > ABB機器人維修 >