簡介:一、機器人第一次上電開機報警50296,SMB內存數據差異. 機器人維修處理方法: 1.ABB主菜單中選擇校準。 2.點擊ROB_1進入,選擇手動方法(高級) 3.點擊進入機械手存儲器,選擇高級 4.進入如下畫面,要注意是控制柜故障要更換控制柜,保留機械手數據時此步應選……
一、機器人第一次上電開機報警“50296,SMB內存數據差異.
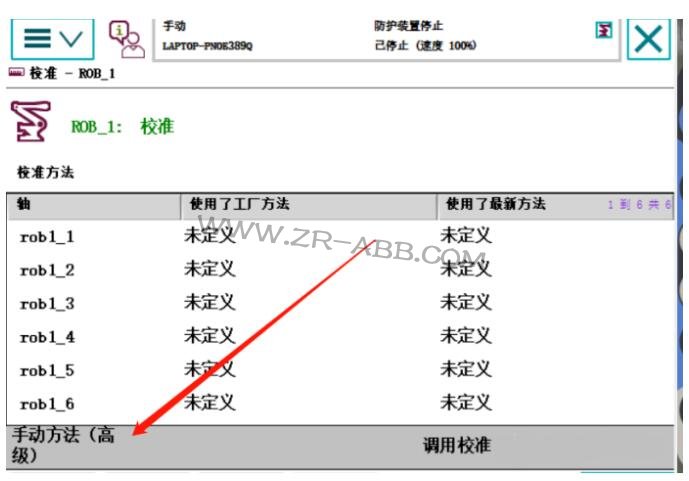
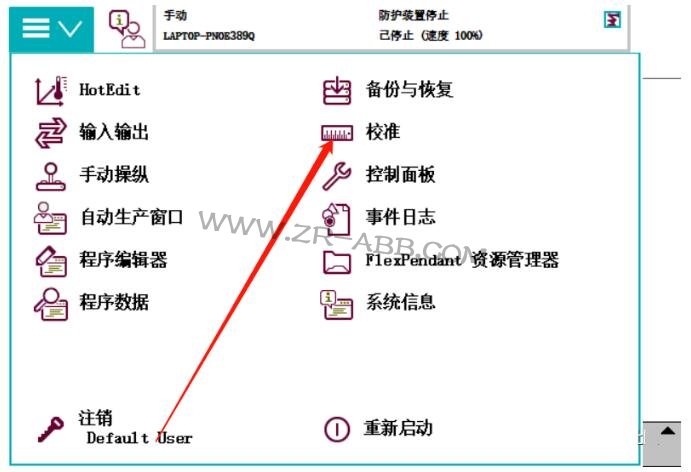
1.ABB主菜單中選擇“校準”。

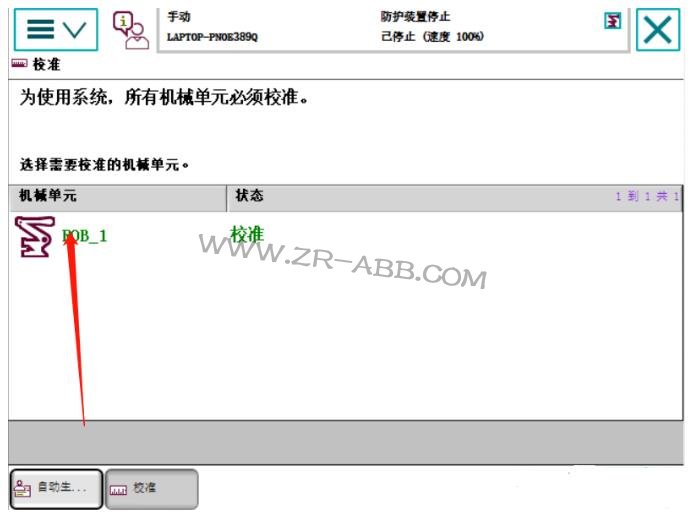
2.點擊“ROB_1”進入,選擇“手動方法(高級)”
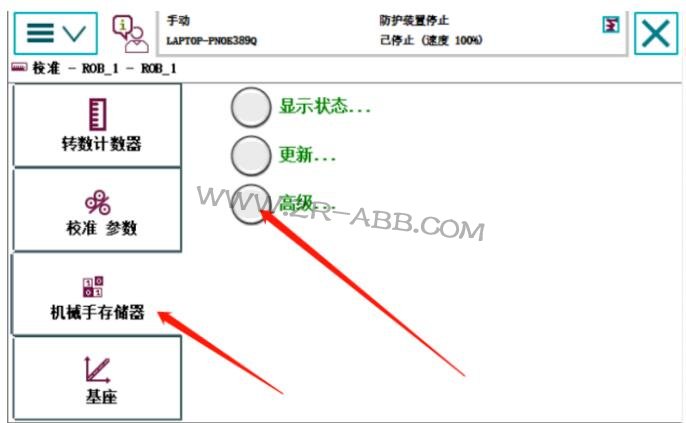
3.點擊進入“機械手存儲器”,選擇“高級”
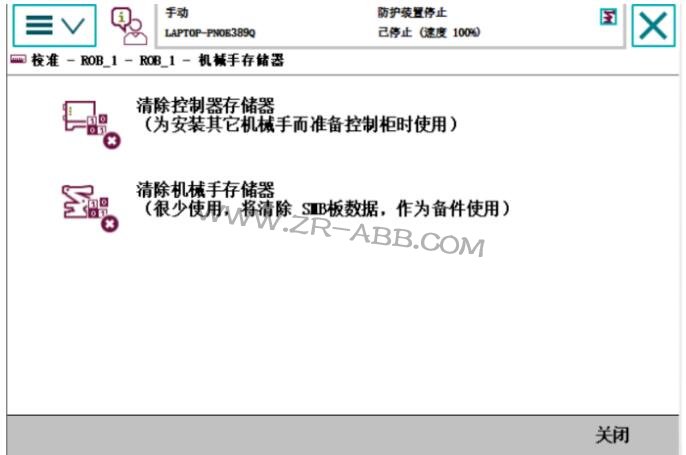
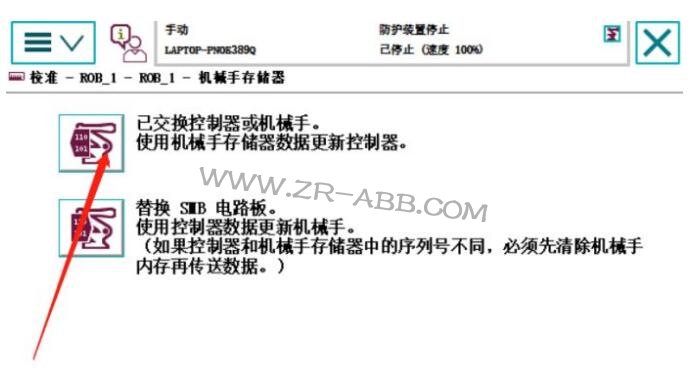
4.進入如下畫面,要注意是控制柜故障要更換控制柜,保留機械手數據時此步應選擇——“清除控制器存儲器”;是機械手本體故障要更換或更換SMB數據板,需要保留控制柜數據,后續導入機械手本體的數據板時,此步應選擇“清除機械手存儲器”。此處以“清除控制器存儲器”為例。
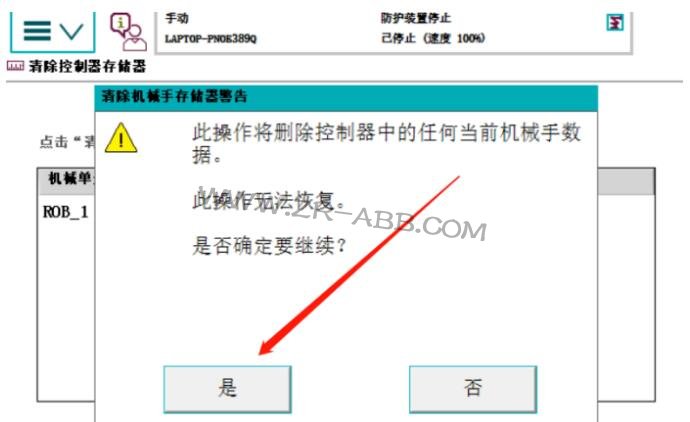
5.點擊進入“清除控制柜存儲器”后,選擇“ROB_1”,點擊“清除”

6.彈出以下對話框,選擇“是”。
7.清除后關閉頁面,回到“機械手存儲器”頁面,選擇“更新”。

8.此處根據第4步的選擇決定,上述步驟我們選擇了“清除控制柜存儲器”,所以此處應選擇“已交換控制器或機械手”將機械手數據導入控制柜中。
二、開機出現系統故障。
此處首先介紹一下機器人的幾種重啟方式:
1.重啟一次。
2.若重啟沒有解決,查看故障信息,排除故障。
3.若還未解決,執行B啟動,恢復至最近一次無錯誤狀態。
4.B啟動無效,請嘗試P啟動。
5.若還未解決請嘗試I啟動(慎用,機器人將恢復出廠設置)。
三、機器人出現10106維護時間提醒
機器人周期維護提醒,不會影響正常運轉,但由于這一點,使用者常常忽視,僅僅將維護工作做在表面,甚至根本不做,等到真正出現故障停機停產時,難免手忙腳亂。
此報警是根據系統時間與ABB廠家的標準周期發生的,機器人應用環境不同,維護周期
也不同,詳細可留言“
機器人維護保養”獲取維護指導。
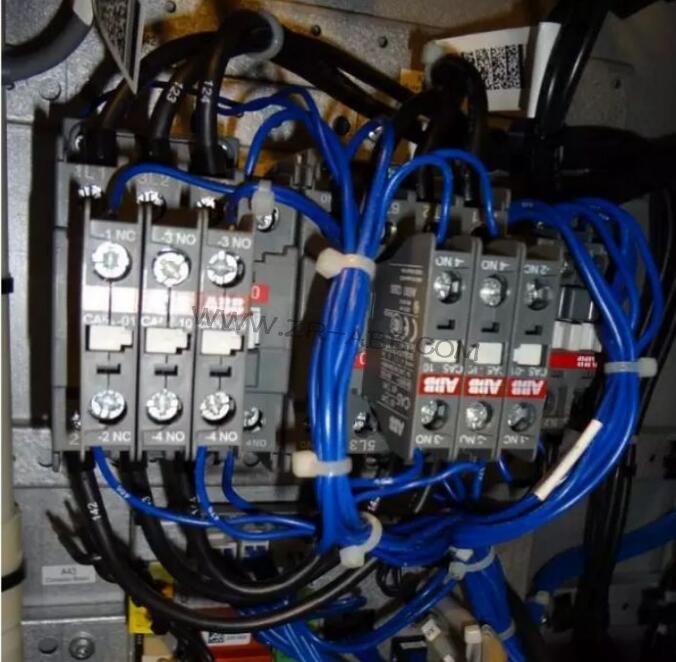
四、報警37001 電機開啟接觸器錯誤
處理方法:
1.表示接觸器動作故障。
2. 接觸器位于柜內左下角,如下圖:
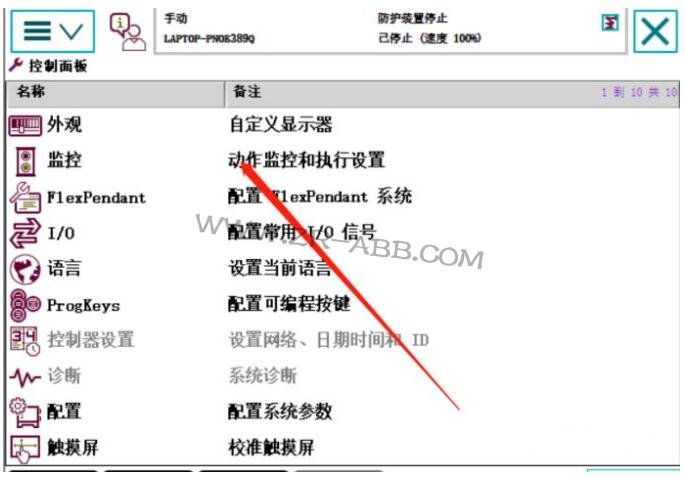
五、報警50204動作監控
1.修改機器人動作監控參數(控制面板—動作監控菜單中)以匹配實際的情況。
2.用AccSet指令降低機器人加速度。
程序編輯時“添加指令”中找到“setting”項,插入“AccSet”指令
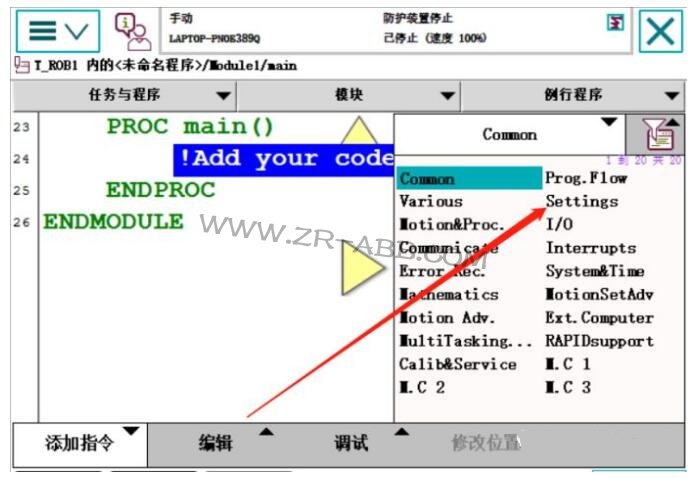
3.減小速度數據中的v_rot選項。
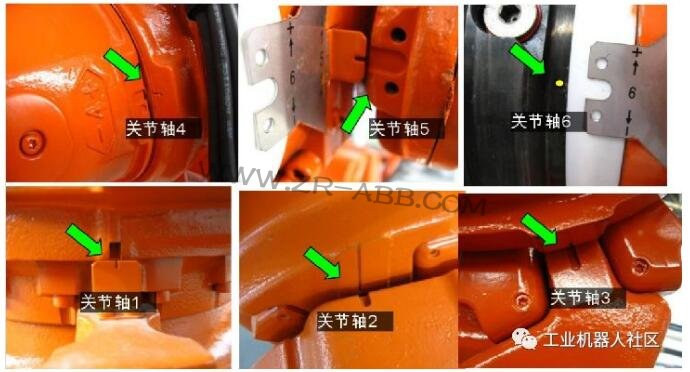
六、轉數計數器未更新
1.先將機器人每個關節移動至機械零點。
2.主菜單中選擇“校準”。
3.選擇“ROB_1”
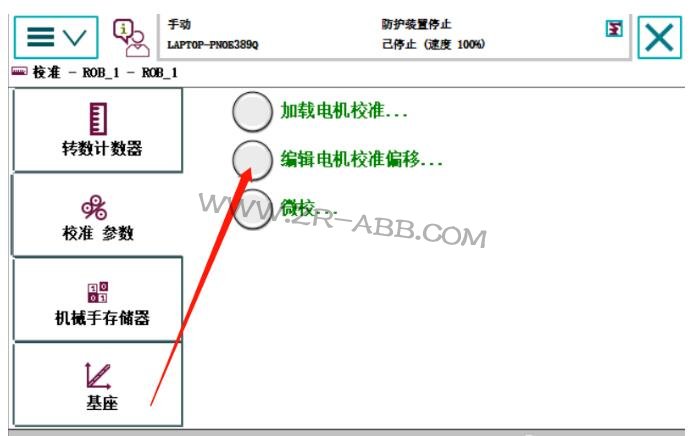
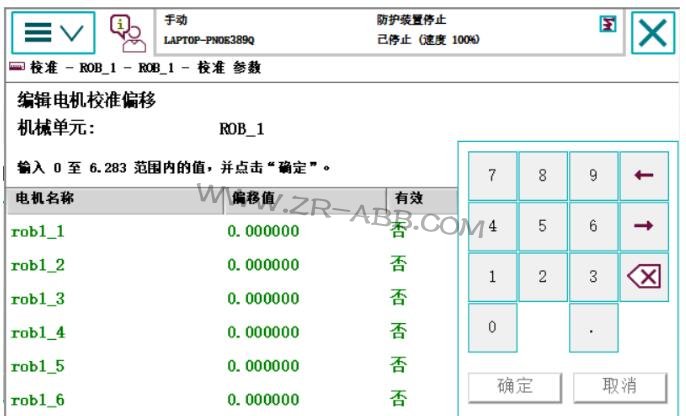
4.點擊進入“手動方法(高級)”后,以下選擇“校準 參數”——“編輯電機校準偏移”。
4.在以下畫面確認電機校準偏移數據是否與 一致,電機校準偏移數據一般在機器人2軸上,若不一致,以出廠值為準,輸入。
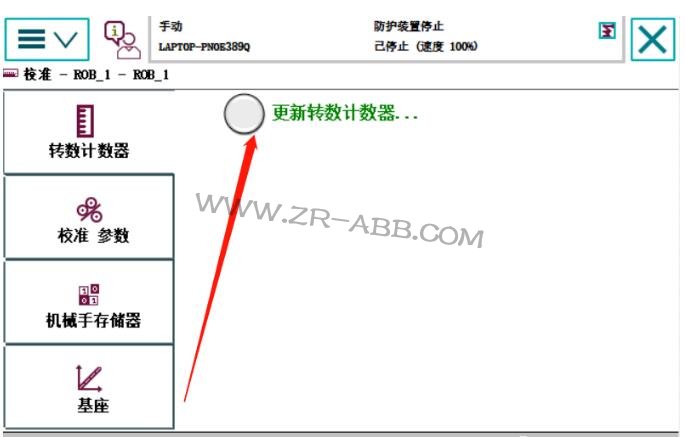
5.確定后返回校準界面,點擊“更新轉數計數器”
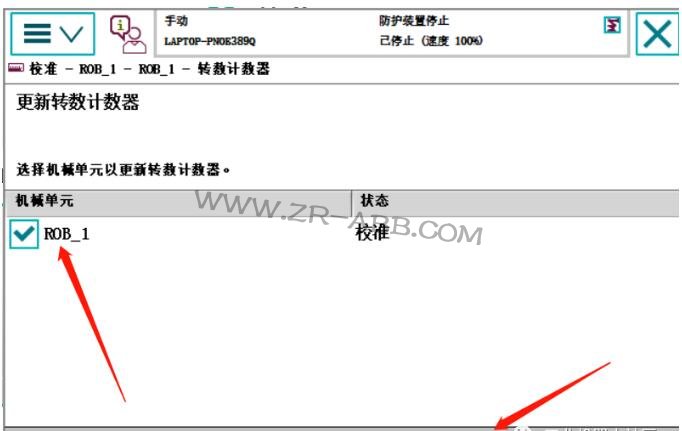
6.彈出對話框選擇“是”,選擇當前機械單元后,點擊“確定”。
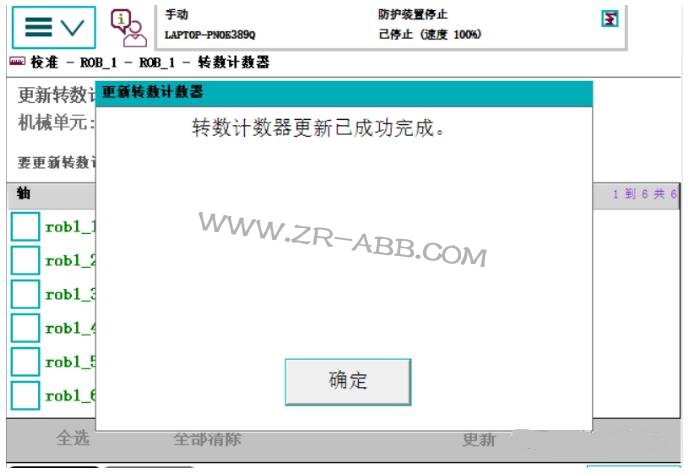
7.根據目前能轉至零刻度點的軸選擇更新軸(有些情況下無法6軸同時回到零刻度點,可以分多次更新),點擊“更新”。

8.彈出對話框,選擇“更新”,出現以下界面。
文章來源,
工業機器人維修官網:www.qhdjznet.com


 首頁 > ABB機器人維修 >
首頁 > ABB機器人維修 > 

