簡介:一、ABB機器人奇異點定義 當機器人關節軸5角度為0度,同時關節軸4和關節軸6是一樣時,則機器人處于奇異點。 利用無限量的機械臂配置可獲得機械臂空間內的某些位置,以確定工具的位置和方位。但在基于工具的位置和方位計算機械臂角度時,這些位置,也就是熟知……
當機器人關節軸5角度為0度,同時關節軸4和關節軸6是一樣時,則機器人處于奇異點。
利用無限量的機械臂配置可獲得機械臂空間內的某些位置,以確定工具的位置和方位。但在基于工具的位置和方位計算機械臂角度時,這些位置,也就是熟知的奇異點,卻成了一個問題。一般說來,機械臂有兩類奇異點,臂奇異點和腕奇異點。
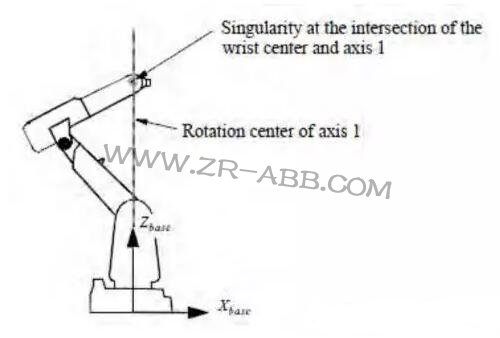
1、臂奇異點:臂奇異點就是腕中心(軸4、軸5和軸6的交點)正好直接位于軸1上方的所有配置。如下圖所示:
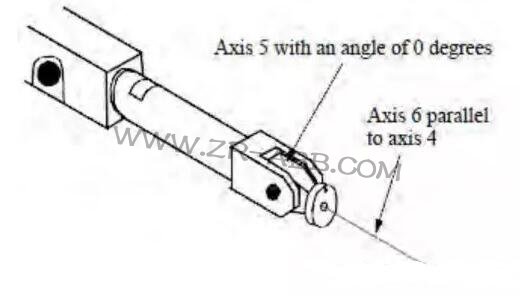
2、腕奇異點:腕奇異點是指軸4和軸6處于同一條線上(即,軸5角度為0)的配置。如下圖所示:
二、如何避免解決機器人出現奇異點
1、布局以及夾具設計
在進行工作站布局時候,要考慮機器人和各個設備之間的擺放布局位置,盡量考慮到機器人在工作過程當中,避免機器人經過奇異點;還可以在考慮機器人夾具在工作中對機器人姿態影響,進而避免奇異點。
如果已指定參數\Wrist,則對方位進行接頭插補,以避免奇異點。在這種情況下,TCP遵循正確的路徑,但是工具方位會稍微偏離。當未通過奇異點時,亦將出現上述情況。
2、SingArea指令
在編程時,也可以使用SingArea這個指令去讓機器人自動規劃當前軌跡經過奇異點時的插補方式。如:
SingArea\Wrist:允許輕微改變工具的姿態,以便通過奇異點
SingArea\Off:關閉自動插補
(1)使用說明
SingArea用于定義機械臂如何在奇異點附近移動。SingArea亦用于定義關于擁有不到六個軸的機械臂的線性和圓周插補,在軸4鎖定為0或+-180度的情況下,可編程六軸機械臂運行。本指令僅可用于主任務T_ROB1,或者如果在MultiMove系統中,則可用于運動任務中。
(2)可選變元:SingArea [\Wrist]|[\LockAxis4]|[\Off]
\Wrist :數據類型為switch,允許工具方位稍微偏離,以避免腕奇異點。其適用于軸4和軸6平行的情況(軸5為0度)。同時適用于擁有不到六個軸的機械臂的線性和圓周插補,其允許工具方位出現偏離。
\LockAxis4 :數據類型為switch,通過將軸4鎖定在0或+-180度,可達到編程位置。如果當軸4位于0或+-180度時,未編程位置,則當前將獲得不同的工具方位。如果軸4的起始位置偏離鎖定位置2度以上,則第一次移動將表現為通過參數\Wrist來調用SingArea一般。
\Off :數據類型為switch,不允許工具方位出現偏離。當未通過奇異點,或不允許方位發生改變時,上述要求適用。如果未指定任何參數,則將系統設置為\Off。
(3)舉例
例一:
SingArea \Wrist;
可略微改變工具方位,以通過奇異點(生產線中的軸4和軸6)。擁有不到六個軸的機械臂,可能無法達到插補的工具方位。通過使用SingArea\Wrist,機械臂可實現移動,但是工具方位將會略微改變。
例二:
SingArea \Off;
不允許工具方位偏離編程方位。如果通過奇異點,則一個或多個軸可實施徹底的移動,從而導致速率降低。擁有不到六個軸的機械臂可能無法達到編程的工具方位。因此,機械臂將停止。
例三:
SingArea \LockAxis4;
通過將軸4鎖定在0或+-180度,可編程六軸機械臂運行,從而避免在軸5接近于零時的奇異點問題。通過將軸4鎖定在0或+-180度,可達到編程位置。如果當軸4位于0或+-180度時,未編程位置,則當前將獲得不同的工具方位。如果軸4的起始位置偏離鎖定位置2度以上,則第一次移動將表現為通過參數\Wrist來調用SingArea一般。在所有后續移動中,軸4將保持鎖定,直至執行新的SingArea指令。
文章來源,
工業機器人維修官網:www.qhdjznet.com


 首頁 > 機器人資訊 >
首頁 > 機器人資訊 > 

