簡介:ABB是全球領先的工業機器人技術供應商,提供包括機器人本體,軟件和外圍設備在內的完整應用解決方案。模塊化制造單元及服務。ABB機器人在全球53個國家、100多個地區開展業務,全球累計裝機量30余萬臺,涉及廣泛的行業和應用領域。 4月17日,中國自動化學會創……
ABB是全球領先的
工業機器人技術供應商,提供包括機器人本體,軟件和外圍設備在內的完整應用解決方案。模塊化制造單元及服務。
ABB機器人在全球53個國家、100多個地區開展業務,全球累計裝機量30余萬臺,涉及廣泛的行業和應用領域。
4月17日,中國自動化學會創新驅動助力工程系列活動在浙江紹興拉開序幕。ABB集團亞洲、中東及非洲區總裁顧純元博士受邀在2019國家機器人發展論壇發表題為“人機協作引領機器人產業未來發展”的主題演講;在同期舉行的中國自動化產業年會上,ABB集團中國研究院負責人、ABB中國首席技術官劉前進博士出席業界領袖論壇并發言;同時,ABB在該活動上獲評多項自動化行業大獎,并正式啟動了2019 ABB杯全國智能技術創新大賽。
筆者檢索了ABB近日公開一項發明專利(CN201780056349.9,一種對工業機器人編程的方法,公開日期2019年4月26日),針對現有機器人編程技術復雜、難學耗時或簡單編程方法有局限性的問題進行了改進。
1、 現有技術
工業機器人是自動化機器,其能夠被編程來執行結合它們的末端執行器(類似夾持器(gripper)或焊接工具等)的空間運動的不同操縱任務。傳統上,用運動控制函數在過程編程語言中對工業機器人編程,其中運動控制函數典型地利用位置和速度作為輸入參數。這需要有關編程語言和函數的使用的知識和技能。此外,機器人的適當和準確的位置數據和速度分布的定義可能是困難和耗時的。
一般向商用工業機器人提供教導器(teach pendant),借助于所述教導器,操作員能夠“推動(jog)”機器人移動到期望的位置并且采用這個作為用于運動函數的輸入參數。雖然這個技術降低了人工數據輸入的量,但是對機器人的推動需要許多技術和經驗并且仍可能是耗時的。
正被用于對一些機器人編程的另一種技術是所謂的“帶領(lead-through)”,其中,機器人由手握住并且跟隨人手的移動。這僅能夠被應用于滿足對應安全性要求并且支持這樣的操作的模式的機器人。
“通過示范的編程”是另外的技術,通過該技術,人的動作被跟蹤和解釋以獲得機器人指令。此技術中涉及的一個問題是以不足的可靠性來解釋人的姿勢并且不能以必要的準確性來獲得用于控制機器人運動的期望的參數。此外,此方法的另外的缺點是在小組件的裝配的示范期間,這些組件常被人手他們自身從視野遮蔽。
使用基于視覺的對象本地化的面向對象的技術一般也要求對適當的視覺作業的編程,其甚至更加難以由應用工程師學習和執行。
此外,考慮到人們習慣利用類似個人計算機、平板計算機或智能電話的計算裝置來工作,且所述計算裝置提供允許在計算裝置的顯示器上標記、旋轉、調整大小或移動圖形元素的人機接口和圖形用戶界面(GUI)。因此,用已知的計算裝置來顯示和操縱相機圖像是十分簡單的,使得圖形和圖像的直接操縱已大體上變成用戶-計算機交互的直觀方式。
解讀:針對現有工業機器人編程技術復雜、難學耗時或部分簡單編程技術的局限性,考慮到現有計算機的圖形+圖像技術的成熟,本發明的旨在提供一種更簡單、更人機友好的對工業機器人簡單編程的方法。
2、本案的技術方案
如圖1所示是本發明應用于實際現場的示意圖。本發明對工業機器人(1)編程的方法,所述機器人(1)具有機器人臂(2),所述機器人臂(2)具有末端執行器(4),所述末端執行器(4)被安裝到所述機器人臂(2),所述機器人(1)由機器人控制單元(6)控制來操縱被布置在所述機器人(1)的工作空間(10)中的工件(8),其中目標坐標(11)系與所述工作空間(10)相關聯并且所述工作空間(10)和所述工件(8)的圖像(12)由圖像捕捉裝置(14)取得并被傳送到具有人機接口(HMI)的計算裝置(16)來生成控制代碼以用于控制所述機器人(1),所述控制代碼被傳送到所述機器人控制單元(6)。
根據本發明,對機器人編程的方法包括下面的一般步驟:
1) 用相機(14)來取得要被操縱的工件(8)和機器人(1)的工作空間(10)的數碼照片;
2) 將圖像傳遞到計算裝置(16),在所述計算裝置(16)上執行同時顯示圖像并且提供控制按鈕(24)的軟件程序,所述控制按鈕(24)與機器人(1)的任務(控制-動作)相關聯,所述機器人(1)的任務(控制-動作)取決于所使用的機器人(1)和工具(末端執行器(4))的種類而類似移動臂、旋轉臂、旋轉工具、 打開夾持器、閉合夾持器或激活焊接工具等;
3) 通過用標記-對象(17)(優選地用矩形框架)在圖像上圖形地標記工件(8)來選定工件(8);
4) 經由控制按鈕(24)或類似圖形菜單或語音的其它輸入通道(HMI)來選擇機器人任務中的一個;
5) 移動或定位顯示屏上顯示的工件的修剪的圖像(cropped image)或標記對象來定義關鍵或目標位置;
6) 使用額外的圖形元素來指定類似抓取(grasp)位置、運動方向等的其它參數;
7) 必要時使用其它輸入通道來豐富任務參數化;
8) 將每個關鍵位置與機器人任務一起存儲為包含關鍵位置和關聯的機器人任務的操縱步驟的序列;
9) 將操縱步驟的序列從由計算裝置(16)用于在顯示屏上顯示捕捉的圖像的坐標系(19)轉換到工件空間的目標坐標系(11),并且由此轉換的序列生成控制代碼以用于控制機器人(1)。
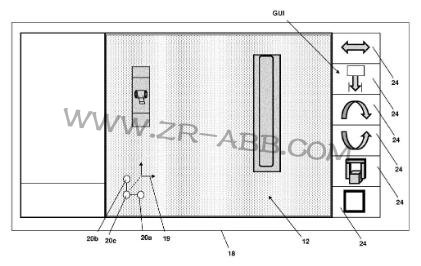
圖2所示為計算裝置(16)的顯示器的GUI界面。
解讀:本發明提供的對機器人的簡單編程方法:
1) 計算裝置通過計算有限的捕捉圖像的參考點,將基于計算裝置的圖形界面的坐標系與基于相機的圖像機器人的實際工況的坐標系相互對應,使得GUI界面的機器人工況與工作空間的實際工況能夠一一對應;
2) 操作人員(如工程師)在GUI界面中執行控制任務,控制GUI界面中機器人及相關部件的動作(如控制末端執行器的打開和閉合,控制機器人機械臂的轉動);
3) 計算裝置將連續的控制任務及關鍵位置生成并存儲為操作序列,并基于步驟1)的對應關系生成控制代碼;
4) 計算裝置將操作人員(如工程師)的控制代碼實時傳遞給工作空間的機器人,完成對工作空間機器人的實際控制。
總的來講,本發明提供的技術方案,類似于現有的PLC的梯型編程方法,只不過更為簡單直觀。
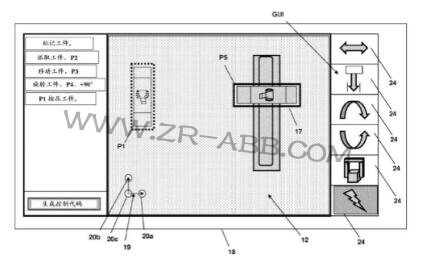
解讀:圖3所示為基于本發明的編程方法,控制機器人,將熔絲移動、旋轉并按壓如制定位置的操作序列生成控制代碼的示意圖。圖3中的GUI界面,右側是控制按鈕,用于實現操作人員(工程師)對GUI界面的中工件操作;中部為工件工作經相機拍攝后在顯示屏上顯示的圖形元素;右側為操作人員(工程師)執行每一步控制任務對應的操作序列。
當操作人員(工程師)在GUI完成控制任務后,可以點擊“生成控制代碼”,即完成上位機的控制代碼生成。通過計算裝置將所述控制代碼傳遞給工作空間的機器人,由于GUI坐標空間與工作空間坐標空間位置一一對應,機器人可在實際的工作空間完成所述控制任務。
3、總結
本發明通過計算裝置及捕捉圖像的參考點計算,將實際工況下的工作空間及機器人(包括末端執行器)與上位機GUI的圖形空間一一對應;并提供圖形化操作界面和“一站式”控制代碼生成模塊,大大降低了非專業人員操作機器人的編程難度,能夠實現編程方法使得習慣處理智能電話和平板計算機的人們能夠方便使用他們的手、筆或者計算機鼠標和鍵盤來實現編程。
文章來源,
工業機器人維修官網:www.qhdjznet.com


 首頁 > 機器人資訊 >
首頁 > 機器人資訊 >