簡介:1、林肯焊機AC-1200焊接電源主回路 1.1、結構特點 AC-1200林肯焊機主電路如圖1所示。采用串聯磁飽和電抗器式分體弧焊變壓器結構。弧焊變壓器初級繞組有六個抽頭,通常情況下,焊機由單相交流380V從H1、H4供電,其它抽頭用于多絲焊的斯科特接法(Scott Connec……
1、林肯焊機AC-1200焊接電源主回路
1.1、結構特點
AC-1200林肯焊機主電路如圖1所示。采用串聯磁飽和電抗器式分體弧焊變壓器結構。弧焊變壓器初級繞組有六個抽頭,通常情況下,焊機由單相交流380V從H1、H4供電,其它抽頭用于多絲焊的斯科特接法(Scott Connection)。磁飽和電抗器的控制繞組由十只繞圈元件組成,分為兩組,分別對稱地安裝在鐵芯兩側芯柱上,線圈采用串聯疊形聯接。從而使控制繞組中的交流感應電勢方向相反,互相抵消,不影響控制回路的工作。磁飽和電抗器中的交流繞組由六只繞圈元件分成三組組成,安裝在鐵芯中間芯柱上,每組有一個輸出抽頭,分大、中、小三檔,用戶可根據實際情況在250~1500A范圍內選擇,通過改變交流線圈漏抗,從而實現規范調節。
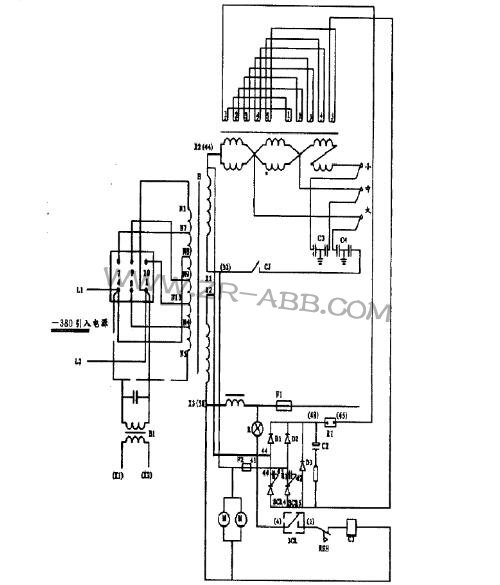
1.2、電流調節
林肯焊機維修,根據磁飽和電抗器的工作原理,即通過改變交流繞組中感抗值大小,
實現對焊接電流的調節。這種結構由于調節時沒有振動,輸出電流穩定,易于控制,容易實現遠距離電流調節。更重要的是,可實現均勻的、大范圍的電流調節。
如圖2所示,磁飽和電抗器控制繞組由具有續流二極管的單相橋式半控電路供電。取自分流器FL上的電流信號,反饋到觸發板L5648,形成電流負反饋,自動調節控制電壓U,保持了輸出電流的恒定。晶閘管觸發回路按控制電壓U值的大小,由集成塊1558/BCBJC(脈沖列調制放大器)形成頻率與其成比例的脈沖,經場效應管功率放大后送入一只脈沖變壓器,加入同步信號后控制半控橋的兩只晶閘管。觸發脈沖對稱性好,抗干擾能力強。通過調節給定電位器(近控、遠控),即改變觸發回路控制電壓,改變晶閘管導通角,實現整流輸出電壓的調節。
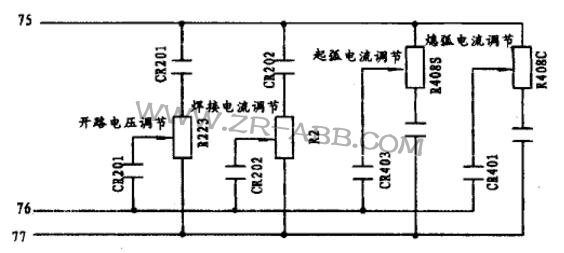
NA4操作箱面板上給定電位器R408S、R2、R408C可在固態繼電器CR401S、CR202、CR401C依次吸合時,對起弧電流、焊接電流、熄弧電流進行調整。給定電位器R223在固態繼電器CR201吸合時,調整焊機電源輸出電壓(此時沒有輸出電流)。
2、送絲回路
2.1、結構特點
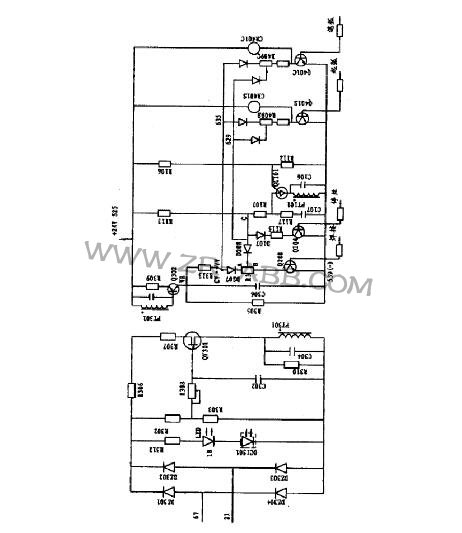
送絲電機激磁繞組由兩只反并聯的可關斷晶閘管組成單相半波整流電路供電,采用單結晶體管(QU103)觸發回路,不移相。由邏輯高低電平(587*線)控制開關管Q106、Q107的導通、截止,分別向脈沖變壓器PT104、PT105放電,形成觸發脈沖,導通晶閘管,從而實現電機換向,焊機送電后向上激磁常加,這種結構實現了電機換向的無觸點控制。電樞繞組由單相半控橋式電路供電(帶續流管),采用可編程單結晶體管(PUT)移相觸發回路輸出脈沖控制晶閘管導通角進行電樞電壓調節。PUT的峰點電壓不由管內體電阻決定,而由外加電壓決定,當陽極電壓大于控制極電壓時,管子導通,反之,關閉。根據PUT的特點,通過對PUT陽極電壓的調節,改變觸發回路充電時間常數,實現電機調速。
2.2、送絲調節
NA4操作箱面板上給定電位器R210、R3、R4095、R409C可預置和調節焊機在空載、起弧、焊接、熄弧狀態時的送絲速度,電壓板上的CV、VW(恒壓、變壓)電源特性開關,可選擇焊機的送絲方式。
A:VV特性
變速送絲控制如圖3所示,它是利用電弧電壓作為反饋量來調節焊機的送絲速度,當電弧電壓增大時加快送絲速度,使弧長得以恢復。電弧電壓經過整流、直流變換、電壓比較電路處理后,送入可編程單結晶體管陽極,對送絲電機進行調速。
注:反饋作用于起弧、焊接、熄弧狀態。
例如:焊接時弧壓U山上升,整流輸出電壓U:上升,單結晶體管觸發回路振蕩頻率f加快,調整管Q302輸出脈沖占空比增加,串聯開關式穩壓電路直流電壓Ua升高。比較電路D107、D208之間壓差減小,Uc(-)電壓上升,PUT觸發回路中電容C107充電加快,觸發脈沖前移,晶閘管導通角加大,導致送絲電機加速。
B:CV特性
開關置于CV特性時,電弧電壓不反饋到送絲回路,只作為焊機的邏輯控制信號。焊機處于等速送絲控制狀態,適用于電極中電流密度大,電弧自身調節作用強的細絲埋弧焊。
3、邏輯控制回路
林肯焊機維修,比起線路復雜、故障率高、觸點多的繼電器控制回路,由集成塊S15018-1、光耦器件、開關三極管等元件組成的AC-1200林肯焊機邏輯回路具有集成度高、線路簡單、實現功能多、調節方便等優點。外部指令、電壓、電流檢測反饋,狀態轉換都使用邏輯高、低電平信號,使回路功耗低,工作安全可靠。下面根據在生產使用中焊機出現的一些故障,對邏輯控制電路進行詳細分析。
3.1、邏輯控制分析
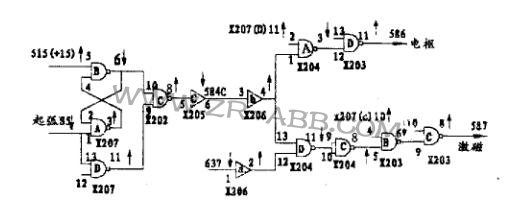
(1)空載送絲
焊機起動后,主接觸器CJ吸合,焊機實現在空載下送絲,如圖4所示。

按起動按鈕
S5→X207(D)13↓→X207(D)11↑→X207(C)8↓→X206(C)6↑(690#)固態繼電器3CR吸合,焊機遠控起動。因此時無焊接電流,
528↑→X206(F)13↑→X206(F)12↓→X202(B)4↓→X202(B)6↑→Q203導通
→CR201吸合,焊機進入空載給定規范下運行,可調節空載電壓、空載送絲速度。
主接觸器吸合,有空載電壓輸出,弧壓反饋
637↓→X206(a)2↑→X204(D)12↑;由于停弧S6↑→X207(B)6↓-X202(C)8↑→X205(C)6↓(584C#)→X206(b)4↑→X204(D)13↑;X204(D)12↑、X204(D)13↑→X204(D)11↓→X204(C)8↑、X207(C)10↑→X203(B)6↓→X203(C)8↑(587*)激磁向下。584C↓→X206(b)4↑、X207(D)11↑-X204(A)3↓(693)→X203(D)11↑(586)-Q103導通一Q104截止PUT陽極位去消,送絲實現。電機送絲控制見圖5。由于此時無電流528↑→Q301導通,穩壓二極管DZ301將弧壓反饋位在5.1V,電機在給定下勻速送絲。焊機起動后,送絲方向決定于弧壓信號電平的高低,637↑時向上去637↓時向下。
點動向下時,焊機專門有一臺變壓器T301為線路輸出弧壓。
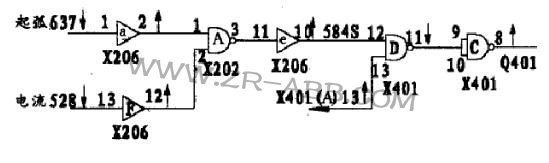
(2)起弧
當焊絲碰到工件,瞬間短路,光耦0CT301斷開637↑,此時焊機在短路大電流下微抽起弧,由于焊絲很快熔化形成電弧637↓,由于有起弧電流產生528↓-Q203截止,焊機空載狀態停止。637↓→X206(a)2↑→X202(A)1↑;
528↓→X206(F)12↑→X202(A)2↑;X202(A)1↑、X202(A)2↑→X202(A)3↓→X206(e)10↑(584s)、X401(D)13↑→X401(D)11↓→X401(C)8↑→Q401導通,焊機進入起弧給定規范下運行,見圖6。
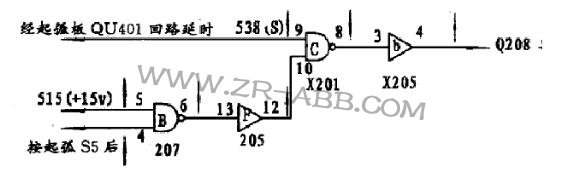
(3)焊接
起弧后,584S↑,起弧板上PUT回路阻容充電至QU401(PUT)導通時,583S↑→X201(C)9↑;由于X207(A)3↑→X207(B)4↑、X207(B)5↑→X207(B)6↓→X205(F)12↑→X201(C)10↑;X201(C)9↑、X201(C)10↑一X201(C)8↓→X205(b)4↑→Q208導通,焊機進入焊接給定規范下運行。不用起弧板時,將584s、583s短接,見圖7。
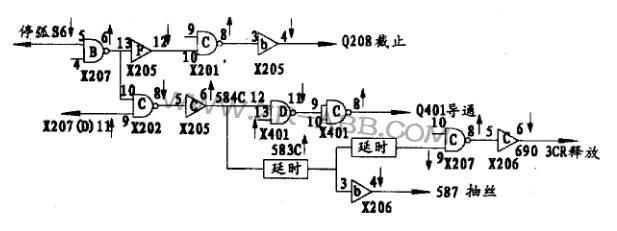
(4)停弧
停弧控制如圖8所示。按停弧按鈕S6后,RS觸發器X207(A、B)翻轉,X207(B)5↓→Q208截止,焊機焊接狀態停止,由于X207(B)5↓→X207(B)6↑→X202(C)10↑、X202(C)9↓→X202(C)8↓→X205(C)6↑,584C、X401(D)13↑→X401(D)11↓→X401(C)8↑→Q401導通,焊機進入給定熄弧規范狀態。經PUT(QU401)回路延時后,583C↑→X206(b)4↓一587↓焊絲反抽。
583C↑→QU201(PUT)陽極得電,經延時后,X207(C)9↓→X207(C)8↑→X206(C)61→3CR釋放,AC-1200焊機斷電。不用熄弧板時,將583C、584C短接。
3.2、故障分析
(1)按S5后,焊機不起動。
①測量690↑線電平,當690↓時,開關管Q206或固態繼電器3CR損壞。當6901時,如515(+15V)電平正常,則數字集成電路損壞。
②測量586↑線電平,當586↓時,QU101(PUT)回路故障。當586,時,(QU101陽極位低電平,不送絲)數字集成電路損壞。
③檢查F101激磁緩熔保險是否熔斷。
(2)起動后,焊絲反抽。
①檢查焊接大線或焊絲是否接地,有無空載電壓。
②在NA4操作箱內測量67”、21*線有無電壓,無電壓斷線。
③測量637*線電平,當637↑時,單結晶體管QU301、調整管Q302、光耦0CI301可能損壞。當637↓時,數字集成電路故障。
④焊絲不熔化,不起弧,沒有弧壓反饋。
(3)起弧后,焊機不轉換。
①測量528*線電平,當528↑時可能518*、517*線斷,或電流互感器線圈燒壞。當528↓、637↓時,數字集成電路塊壞。否則,開關管Q208或固態繼電器CR202壞。
②電流互感器二次側整流燒壞,不可能使開關管Q501導通。
③起弧一焊接規范不匹配。
文章來源,
工業機器人維修官網:www.qhdjznet.com


 首頁 > 焊機維修 > 林肯焊機維修 >
首頁 > 焊機維修 > 林肯焊機維修 > 

