簡介:機器人示教系統的原理、分類及特點 ABB示教器維修,針對現代工業快速多變以及日益增長的復雜性要求,繼柔性制造、計算機集成制造、精良生產及并行工程,在而向未來工業應用的生產單元中,機器人不僅被要求不知疲倦地進行簡單重復工作.而且能作為一個高度柔性……
機器人示教系統的原理、分類及特點
ABB示教器維修,針對現代工業快速多變以及日益增長的復雜性要求,繼柔性制造、計算機集成制造、精良生產及并行工程,在而向未來工業應用的生產單元中,機器人不僅被要求“不知疲倦”地進行簡單重復工作.而且能作為一個高度柔性、開放并幾有友好的人機交互功能的可編程、可爪構制造單元融合到制造業系統中,這一能力的實現要求現階段機器人技術椎體的進步.示教技術就是其中爪要的一項。機器人因為能被編程完成不同的任務而被視為柔性的自動化設備“。通過某一設備或方式實現對機器人作業任務的編程,這個過程就是機器人的示教過程。
現有的機器人示教系統可以分為以下三類
(1)示教再現方式
廣州子銳
ABB機器人:ABB示教再現(t eaching pla油ack),也稱為直接示教,就是指我們通常所說的手把手示教,由人直接搬動機器人的手臂對機器人進行示教,如示教盒示教或操作桿示教等。在這種示教中,為了示教方便以及獲取信息的快捷而準確,操作者可以選擇在不同坐標系下示教,例如,可以選擇在關節坐標系(Joint Coordinates)、直角坐標系(Reetan:ular Coordinate:)以及工j毛坐標系(Tool Coordinates)或用戶坐標系(User Coordinates)卜進行示教。
ABB機器人示教再現是機器人普遍采用的編程方式.典型的示教過程是依靠操作員觀察機器人及其夾持工具相對于作業對象的位姿,通過對示教盒的操作,反復調稚示教點處機器人的作業位姿、運動參數和工藝參數,然后將滿足作業要求的這些數據記錄下來,再轉入下一點的示教。
在示教過程結束后,機器人實際運行時使用這些被記錄的數據,經過插補運算,就可以再現在示教點上記錄的機器人位置。
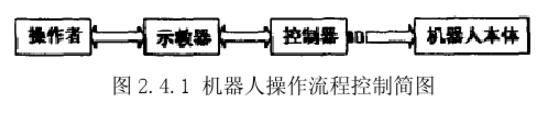
這個功能的用戶接‘」是示教器鍵盤,操作證通過通過操作示教器,向主控計算機發送控制命令,操縱主控計算機上的軟件,完成對機器人的控制:其次示教器將接收到的當前機器人運動和狀態等信息通過液,l丙屏完成顯示。示教器通過線纜與主控計算機相連。
在這種示教方式中,示教眾是一個垂要的編程設備,一般具備直線、圓弧、關節插補以及能夠分別在關節空間和笛卡爾空間實現對機器人的控制等功能。
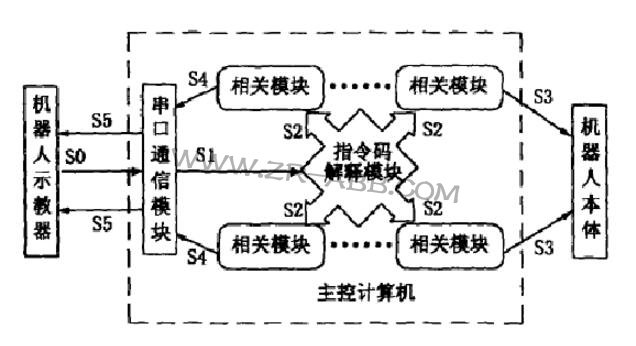
示教時,當用戶按下示教鍵盤上的按鍵時,示教器通過線纜向主控計算機發出相應的指令代碼(S0):此時,主控計算機上的主控模塊中負責串口通信的通信子模塊中的串日監視線程接收指令代碼(51):然后由指令碼解釋模塊分析判斷該指令碼,并進一步向相關校塊發送與指令碼相應的消息(S2);馭動有關校塊完成該指令碼要求的具體功能(S3),同時.為了讓操作用戶l付刻掌握機器人的運動位置和各種狀態信息.主控計算機的有關校塊同時將狀態信息(S4)從串口發送給示教器(S5),在液晶顯示屏上顯示,從而與用戶溝通.完成數據的交換功能。
在早期的示教再現系統中,還有一種人工牽引示教【2】一般是操作員直接牽引機器人沿作業路徑運動一遍,對于難以直接牽引的大、中型功率液壓機器人,這種方式并不合適于是又有人工模擬牽引示教,在牽引的過程中,由計算機對機器人各關節運動數據采樣記錄.得到作業路徑數據.由于這些數據是各關節的數據.因此這種方法又被稱為關節坐標示教法.這種示教方法的優點是控制簡單,缺點是勞動強度人,操作技巧性高.精度不易保證。
如果示教失誤,修正路徑的唯一方法就是改新示教。
利用了機器人幾有較高的重復定位精度優點.降低了系統誤差對機器人運動絕對精度的影響,這也是目前機器人普遍采用這種示教方式的主要原因。
要求操作員只有相當的專業知識和熟練的操作技能,并需要現場近距離示教操作,因而具有一定的危險性,安全性較差
示教過程繁瑣、費時,需要根據作業任務反復調整機器人的動作軌跡姿態與位置.時效性較差。
(2)離線編程方式
從于CAD/CAM的機器人離線編程示教.是利用計算機圖形學的成染,建立起機器人及其工作環境的模型,使用某種機器人編程語言,通過對圖形的操作和控制,離線計算和規劃出機器人的作業軌跡.然后對編程的結果進行三維圖形仿真,以檢驗編程的正確性【6]。最后在確認無誤后.生成機器人可執行代碼下載到機器人控制器中,用以控制機器人作業。根據使用編程語言的層次不同,離線編程又可分為執行級編程和任務級編程【7]。
(3)從于虛擬現實方式
隨著計算機學及相關學科的發展,特別是機器人遙操作、虛擬現實、傳感器信息處理等技術的進步為準確、安全、高效的機器人示教提供了新的思路,為用戶提供一種嶄新和諧的人機交互操作環境的虛擬現實技術(Virtual Reality,VR)出現和應用尤其吸引T眾多機器人與自動化領域的學者的注意【9]。這里,虛擬現實作為高端的人機接rl.允許用戶通過聲、像、力以及圖形等多種交互設備實時地與虛擬環境交互。根據用戶的指揮或動作提示,示教或監控機器人進行復雜的作業【101。利用虛擬現實技術進行機器人示教是機器人學中新興的研究方向。
文章來源,
工業機器人維修官網:www.qhdjznet.com


 首頁 > ABB示教器維修 >
首頁 > ABB示教器維修 >