簡(jiǎn)介:ABB機(jī)器人維修,手動(dòng)操作機(jī)器人 手動(dòng)操作機(jī)器人: 1、操縱窗口切換: 將機(jī)器人操作模式選擇器置于手動(dòng)限速模式。 切換至操縱窗口。 2運(yùn)動(dòng)控制鍵: (1)運(yùn)動(dòng)單元切換鍵: ExternalUnit-外軸運(yùn)動(dòng)單元Robot-機(jī)器人 光標(biāo)指向機(jī)器人,操縱桿操縱機(jī)器人本體運(yùn)動(dòng)。……
選擇不同坐標(biāo)系,機(jī)器人移動(dòng)方向?qū)⒏淖儭?/div>
Reorientation-姿態(tài)運(yùn)動(dòng)
工業(yè)機(jī)器人TCP位置不變,機(jī)器人工具沿座標(biāo)軸轉(zhuǎn)動(dòng),改變姿態(tài)。
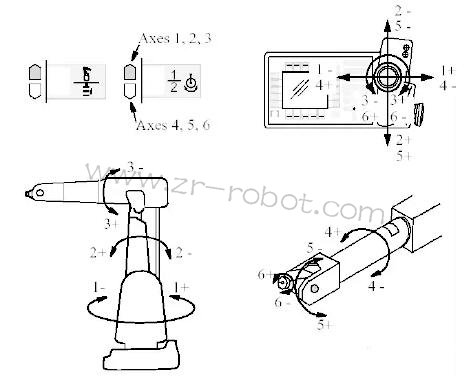
Axes-單軸運(yùn)動(dòng)
Axes1,2,3-第一、二、三軸
3座標(biāo)系設(shè)定:
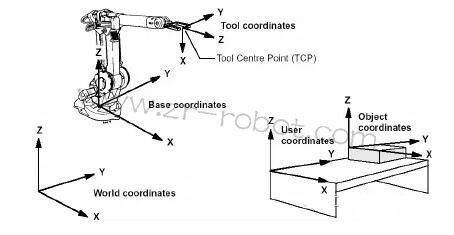
(1)座標(biāo)系種類(lèi):
|
Worldcoordinates
|
大地座標(biāo)系
|
|
|
Basecoordinates
|
基礎(chǔ)座標(biāo)系
|
|
|
Toolcoordinates
|
工具座標(biāo)系
|
|
|
Workobjectcoordinates
|
工件座標(biāo)系
|
(2)座標(biāo)系選擇:
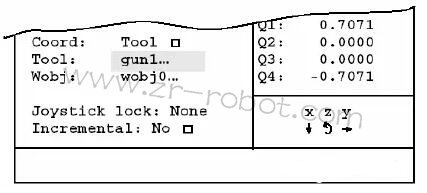
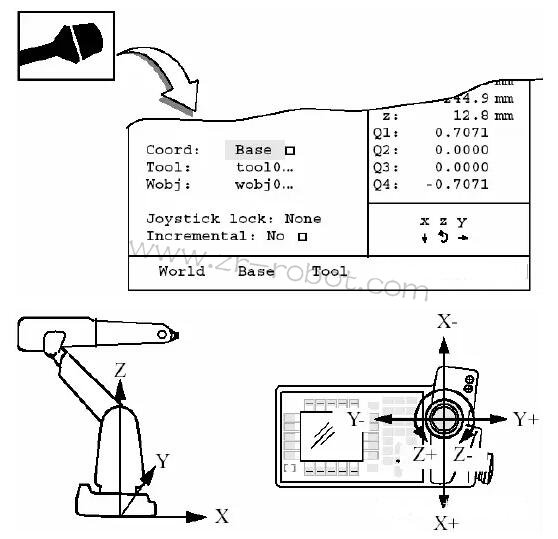
進(jìn)入操縱窗口后,使用光標(biāo)移動(dòng)鍵將光標(biāo)移至選項(xiàng)Coord,此時(shí)顯示器下端功能鍵上將顯示W(wǎng)orld、Base、Tool、Wobj四種選項(xiàng),按相應(yīng)功能鍵選擇座標(biāo)系。
(3)工具選擇:
進(jìn)入操縱窗口后,使用光標(biāo)移動(dòng)鍵將光標(biāo)移至選項(xiàng)Tool,按回車(chē)鍵,此時(shí)顯示器顯示機(jī)器人系統(tǒng)內(nèi)工具清單,使用光標(biāo)移動(dòng)鍵將光標(biāo)移至相應(yīng)的工具,通過(guò)功能鍵OK選擇。
(4)工件座標(biāo)系選擇:
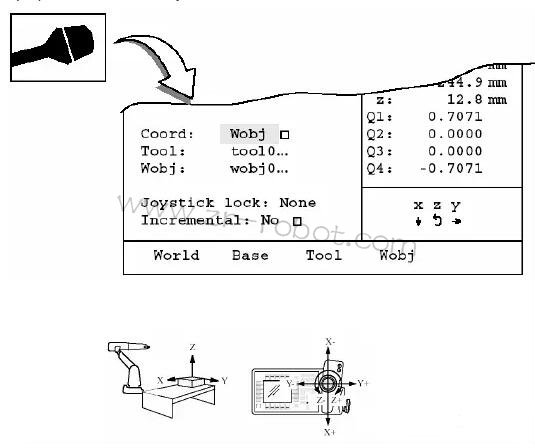
光標(biāo)移至選項(xiàng)Wobj,按回車(chē)鍵,顯示器顯示工件座標(biāo)系清單,將光標(biāo)移至相應(yīng)的工件座標(biāo)系,通過(guò)功能鍵OK選擇。只有機(jī)器人座標(biāo)系Coord選擇Wobj時(shí),此項(xiàng)選擇才起作用。
4、操縱桿鎖定選擇:
進(jìn)入操縱窗口后,使用光標(biāo)移動(dòng)鍵將光標(biāo)移至選項(xiàng)Joysticklock,此時(shí)顯示器下端功能鍵上將顯示None與三種箭頭共四種選項(xiàng),按相應(yīng)功能鍵選擇鎖定機(jī)器人操縱桿前后、左右與旋轉(zhuǎn)。
5、點(diǎn)動(dòng)速度選擇:
使用光標(biāo)移動(dòng)鍵將光標(biāo)移至選項(xiàng)Incremental,顯示器下端功能鍵上顯示None、SmallMedium、Large與User四種選項(xiàng),按相應(yīng)功能鍵選擇相應(yīng)速度。用點(diǎn)動(dòng)操縱鍵可以快速控制點(diǎn)動(dòng)速度打開(kāi)或關(guān)閉。當(dāng)機(jī)器人處于點(diǎn)動(dòng)狀態(tài)時(shí),每動(dòng)一下?lián)u桿,機(jī)器人移動(dòng)一步,搖桿傾斜超過(guò)1秒鐘后,機(jī)器人以每秒10步的速度連續(xù)移動(dòng),直到搖桿復(fù)位。
No(Normal) 正常狀態(tài),連續(xù)移動(dòng)。
Small 小,每單元移動(dòng)0.05mm或0.005度。
Medium 中,每單元移動(dòng)1mm或0.02度。
Large 大,每單元移動(dòng)5mm或0.2度。
User 用戶(hù)自定義點(diǎn)動(dòng)速度。
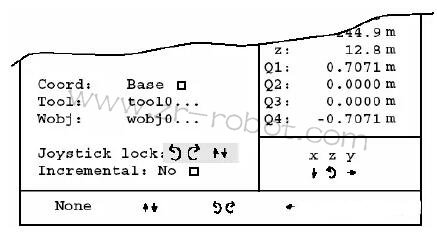
6、機(jī)器人當(dāng)前位置顯示:
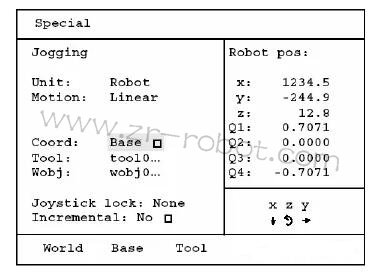
進(jìn)入操縱窗口后,在顯示屏右側(cè)Robotpos會(huì)顯示機(jī)器人當(dāng)前位置。
當(dāng)機(jī)器人運(yùn)動(dòng)模式為直線運(yùn)動(dòng)或姿態(tài)運(yùn)動(dòng)時(shí),顯示屏顯示機(jī)器人當(dāng)前X、Y、Z座標(biāo)值與空間姿態(tài)值Q1、Q2、Q3、Q4。根據(jù)基座標(biāo)系、機(jī)器人工具TCP或工件座標(biāo)系的不同選擇,數(shù)值會(huì)發(fā)生變化。
當(dāng)機(jī)器人運(yùn)動(dòng)模式為單軸運(yùn)動(dòng)時(shí),顯示屏顯示機(jī)器人當(dāng)前每個(gè)軸的轉(zhuǎn)角偏差。
7、使能器:
自動(dòng)模式下,使能器無(wú)效。
手動(dòng)模式下,使能器有三個(gè)位置。
起始為“0”,機(jī)器人電機(jī)不上電。
中間為“1”,機(jī)器人電機(jī)能上電。
最終為“0”,機(jī)器人電機(jī)不上電,必須回到起始狀態(tài)才能再次使電機(jī)上電。
8、直線運(yùn)動(dòng):
運(yùn)動(dòng)方式設(shè)置:
(1)操縱機(jī)器人沿Base座標(biāo)系的方向移動(dòng):
(2)操縱機(jī)器人沿Tool座標(biāo)系的方向移動(dòng):
(3)操縱機(jī)器人沿Wobj座標(biāo)系的方向移動(dòng):
(4)操縱機(jī)器人沿World座標(biāo)系的方向移動(dòng):
9、姿態(tài)運(yùn)動(dòng):
運(yùn)動(dòng)方式設(shè)置:
機(jī)器人將以如圖所示方式繞選定工具的中心點(diǎn)(TCP)旋轉(zhuǎn)。
10、單軸運(yùn)動(dòng):
11、外軸運(yùn)動(dòng):
運(yùn)動(dòng)方式設(shè)置:
進(jìn)入操縱窗口,按運(yùn)動(dòng)單元切換鍵至外軸運(yùn)動(dòng),此時(shí)顯示屏在功能鍵處顯示所有可控制的外軸名稱(chēng)。按功能鍵選擇要操縱的外軸單元。如果系統(tǒng)有超過(guò)5個(gè)外軸,按回車(chē)鍵,功能鍵上可顯示其他的外軸。一般情況下,外軸采用單軸運(yùn)動(dòng)方式。
文章來(lái)源,
工業(yè)機(jī)器人維修官網(wǎng):www.qhdjznet.com

 機(jī)器人資訊
機(jī)器人資訊 80%企業(yè)面臨倒閉,工業(yè)機(jī)器人產(chǎn)能?chē)?yán)重過(guò)剩
80%企業(yè)面臨倒閉,工業(yè)機(jī)器人產(chǎn)能?chē)?yán)重過(guò)剩
 首頁(yè) > ABB示教器維修 >
首頁(yè) > ABB示教器維修 > 