簡介:一、機器人安全操作守則 ABB機器人維修,由于機器人系統復雜而且危險性大,在練習期間,對機器人進行任何操作都必須注意安全。無論什么時候進入機器人工作范圍都可能導致嚴重的傷害,只有經過培訓認證的人員才可以進入該區域。 以下的安全守則必須遵守: 萬……
一、機器人安全操作守則
ABB機器人維修,由于機器人系統復雜而且危險性大,在練習期間,對機器人進行任何操作都必須注意安全。無論什么時候進入機器人工作范圍都可能導致嚴重的傷害,只有經過培訓認證的人員才可以進入該區域。

以下的安全守則必須遵守:
萬一發生火災,請使用二氧化碳滅火器。
急停開關(E-Stop)不允許被短接。
機器人處于自動模式時,任何人員都不允許進入其運動所及的區域。
在任何情況下,不要使用機器人原始啟動盤,用復制盤。
機器人停機時,夾具上不應置物,必須空機。
機器人在發生意外或運行不正常等情況下,均可使用E-Stop鍵,停止運行。
因為機器人在自動狀態下,即使運行速度非常低,其動量仍很大,所以在進行編程、測試及維修等工作時,必須將機器人置于手動模式。
氣路系統中的壓力可達0.6MP,任何相關檢修都要切斷氣源。
在手動模式下調試機器人,如果不需要移動機器人時,必須及時釋放使能器(EnableDevice)。
調試人員進入機器人工作區域時,必須隨身攜帶示教器,以防他人誤操作。
在得到停電通知時,要預先關斷機器人的主電源及氣源。
突然停電后,要趕在來電之前預先關閉機器人的主電源開關,并及時取下夾具上的工件。
機器人維修,維修人員必須保管好機器人鑰匙,嚴禁非授權人員在手動模式下進入機器人軟件系統,隨意翻閱或修改程序及參數。
二、機器人操作面板功能:
1、機器人示教單元
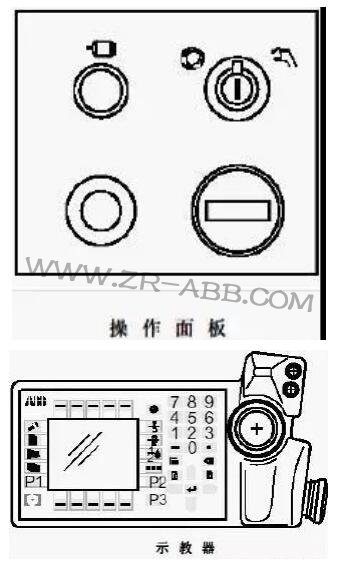
2、馬達上電按鈕(帶顯示燈):
顯示燈常亮,機器人已上電,待命狀態。
顯示燈閃爍(1Hz),機器人未上電。
顯示燈急促閃爍(4Hz),機器人未同步。
3、機器人急停按鈕:
4、操作模式選擇器(帶鑰匙):
(1)自動模式:用于正式生產,編輯程序功能被鎖定。
(2)限速模式:<250mm/s用于機器人編程測試。
(3)手動全速模式:只允許專業人員在測試程序時使用。一般情況下,避免使用這種運動模式。(選配項)
5、機器人運行時間計時器:
顯示機械手馬達上電,剎車釋放的總時間。為機器人維修與保養提供數據。
三、示教器功能:
1、功能顯示
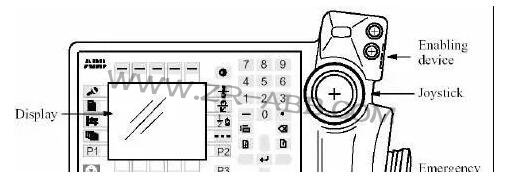
Emergencystopbutton(E-Stop):急停開關。
Enablingdevice:使能器。
Joystick:操縱桿。
Display:顯示屏。
2、窗口鍵:(Windowkeys)
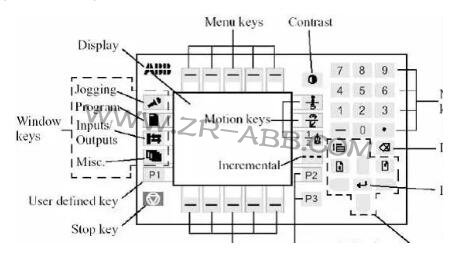
Jogging -操縱窗口手動狀態下,用來操縱機器人。顯示屏上顯示機器人相對位置及當前座標系。
rogram-編程窗口手動狀態下,用來編程與測試。所有編程工作都在編程窗口中完成。
Input/Outputs-輸入/輸出窗口顯示輸入輸出信號表與其數值。可手動給輸出信號賦值。
Misc.-其他窗口:包括系統參數、服務、生產以及文件管理窗口。
3、導航鍵:(Navigationkeys)
List -切換鍵將光標在窗口的幾個部分間切換。(通常由雙實線分隔)
extPage-向下翻頁鍵將光標向下快速移動。
reviousPage-向上翻頁鍵將光標向上快速移動。
Uparrows-光標上移鍵將光標向上單步移動。
Downarrows-光標下移鍵將光標向下單步移動。
Leftarrows-光標左移鍵將光標向左單步移動。
Rightarrows-光標右移鍵將光標向左單步移動。
4、運動控制鍵:(Motionkeys)
MotionUnit-運動單元切換鍵手動狀態下,操縱機器人本體與機器所控制的其他機械裝置(外軸)之間的切換。
MotionType1-運動模式切換鍵1直線運動與姿態運動切換鍵。
直線運動是指機器人TCP沿座標系X、Y、Z軸方向作直線運動。
姿態運動是指機器人TCP在座標系中X、Y、Z軸數值不變,只沿著X、Y、Z軸旋轉,改變姿態。
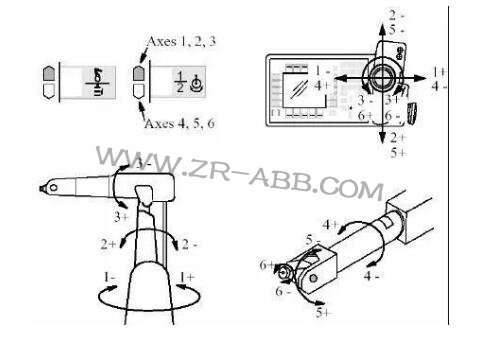
MotionType2-運動模式切換鍵2單軸運動選擇鍵。
第一組:1、2、3軸
第二組:4、5、6軸
Incremental-點動操縱鍵
啟動或關閉點動操縱功能,從而控制機器人手動運行時速度。
5、其他鍵:(Otherkeys)
top-停止鍵停止機器人程序運行。
Contrast-光亮鍵調節顯示器對比度。
MenuKeys-菜單鍵顯示下拉式菜單(熱鍵),共有五個菜單鍵,顯示包含各種命令的菜單。
Functionkeys-功能鍵直接選擇功能(熱鍵),共有五個功能鍵,直接選擇各種命令。
Delete-刪除鍵刪除顯示屏所選數據,機器人操作時,所要刪除任何數據、文件、目錄等,都用此鍵。
Enter-回車鍵進入光標所示數據。
6、自定義鍵:(Programmablekeys)
P1-P5這五個自定義鍵的功能可由程序員自定義,每個鍵可以控制一個模擬輸入信號或一個輸出信號以及其端口。
四、手動操作機器人:
1、操縱窗口切換:
將機器人操作模式選擇器置于手動限速模式。
切換至操縱窗口。
2運動控制鍵:
(1)運動單元切換鍵:
ExternalUnit-外軸運動單元Robot-機器人
光標指向機器人,操縱桿操縱機器人本體運動。
光標指向外軸,操縱桿操縱外軸,一臺機器人最多可控制六個外軸。
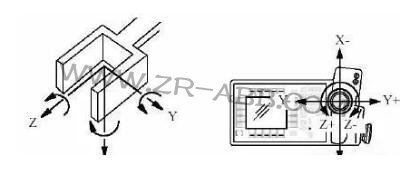
(2)運動模式切換鍵:
Linear-直線運動
機器人工具姿態不變,機器人TCP沿座標軸線性移動。
選擇不同坐標系,機器人移動方向將改變。
Reorientation-姿態運動
機器人TCP位置不變,機器人工具沿座標軸轉動,改變姿態。
Axes-單軸運動
Axes1,2,3-第一、二、三軸
3座標系設定:
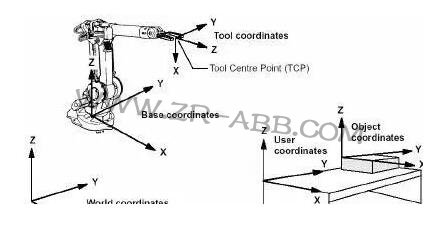
(1)座標系種類:
|
Worldcoordinates |
大地座標系 |
|
|
Basecoordinates |
基礎座標系 |
|
|
Toolcoordinates |
工具座標系 |
|
|
Workobjectcoordinates |
工件座標系 |
|
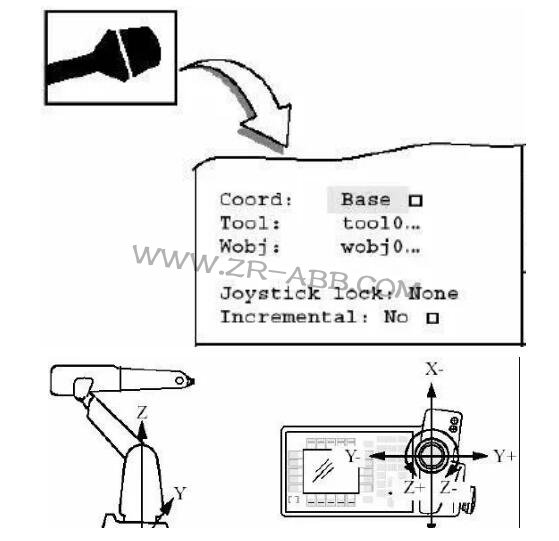
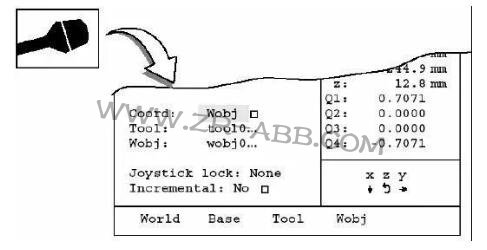
(2)座標系選擇:
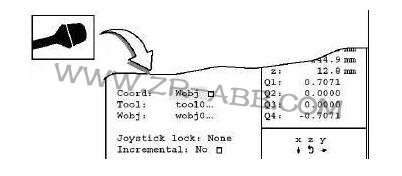
進入操縱窗口后,使用光標移動鍵將光標移至選項Coord,此時顯示器下端功能鍵上將顯示World、Base、Tool、Wobj四種選項,按相應功能鍵選擇座標系。
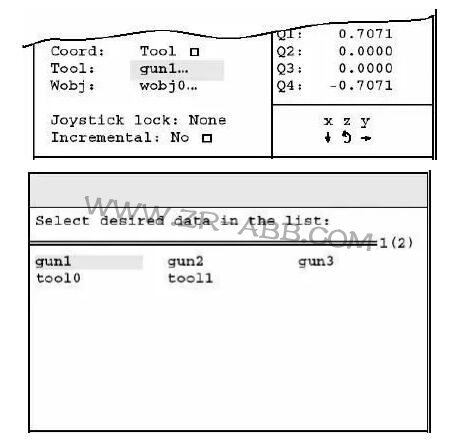
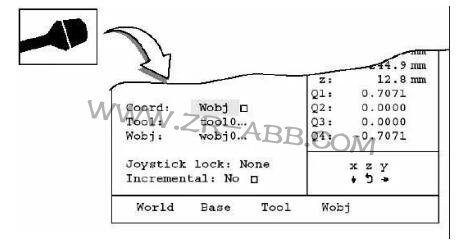
(3)工具選擇:
進入操縱窗口后,使用光標移動鍵將光標移至選項Tool,按回車鍵,此時顯示器顯示機器人系統內工具清單,使用光標移動鍵將光標移至相應的工具,通過功能鍵OK選擇。
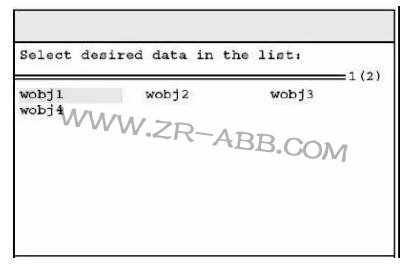
(4)工件座標系選擇:
光標移至選項Wobj,按回車鍵,顯示器顯示工件座標系清單,將光標移至相應的工件座標系,通過功能鍵OK選擇。只有機器人座標系Coord選擇Wobj時,此項選擇才起作用。
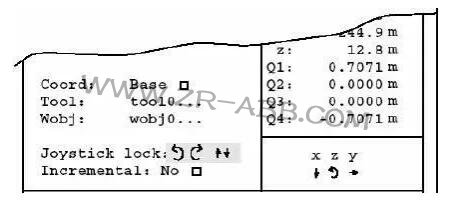
4、操縱桿鎖定選擇:

進入操縱窗口后,使用光標移動鍵將光標移至選項Joysticklock,此時顯示器下端功能鍵上將顯示None與三種箭頭共四種選項,按相應功能鍵選擇鎖定機器人操縱桿前后、左右與旋轉。
5、點動速度選擇:
使用光標移動鍵將光標移至選項Incremental,顯示器下端功能鍵上顯示None、SmallMedium、Large與User四種選項,按相應功能鍵選擇相應速度。用點動操縱鍵可以快速控制點動速度打開或關閉。當機器人處于點動狀態時,每動一下搖桿,機器人移動一步,搖桿傾斜超過1秒鐘后,機器人以每秒10步的速度連續移動,直到搖桿復位。
No(Normal) 正常狀態,連續移動。
Small 小,每單元移動0.05mm或0.005度。
Medium 中,每單元移動1mm或0.02度。
Large 大,每單元移動5mm或0.2度。
User 用戶自定義點動速度。
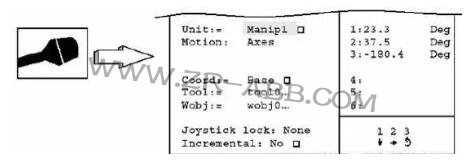
6、機器人當前位置顯示:
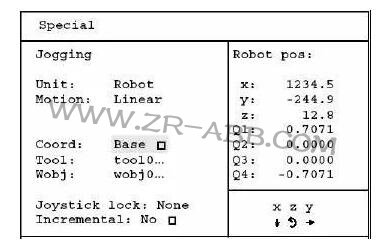
進入操縱窗口后,在顯示屏右側Robotpos會顯示機器人當前位置。
當機器人運動模式為直線運動或姿態運動時,顯示屏顯示機器人當前X、Y、Z座標值與空間姿態值Q1、Q2、Q3、Q4。根據基座標系、機器人工具TCP或工件座標系的不同選擇,數值會發生變化。
當機器人運動模式為單軸運動時,顯示屏顯示機器人當前每個軸的轉角偏差。
7、使能器:
自動模式下,使能器無效。
手動模式下,使能器有三個位置。
起始為“0”,機器人電機不上電。
中間為“1”,機器人電機能上電。
最終為“0”,機器人電機不上電,必須回到起始狀態才能再次使電機上電。
8、直線運動:
運動方式設置:
(1)操縱機器人沿Base座標系的方向移動:
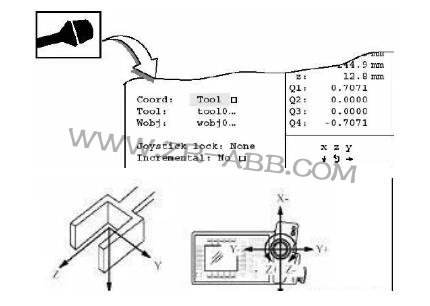
(2)操縱機器人沿Tool座標系的方向移動:
(3)操縱機器人沿Wobj座標系的方向移動:
(4)操縱機器人沿World座標系的方向移動:
9、姿態運動:
運動方式設置:
機器人將以如圖所示方式繞選定工具的中心點(TCP)旋轉。
10、單軸運動:
11、外軸運動:
運動方式設置:
進入操縱窗口,按運動單元切換鍵至外軸運動,此時顯示屏在功能鍵處顯示所有可控制的外軸名稱。按功能鍵選擇要操縱的外軸單元。如果系統有超過5個外軸,按回車鍵,功能鍵上可顯示其他的外軸。一般情況下,外軸采用單軸運動方式。
文章來源,
工業機器人維修官網:www.qhdjznet.com


 首頁 > ABB示教器維修 >
首頁 > ABB示教器維修 > 

